GB/T 43947-2024 PDF EnglishUS$365.00 · In stock · Download in 9 seconds
GB/T 43947-2024: General technical requirements for chassis-by-wire of low speed automated vehicle Delivery: 9 seconds. True-PDF full-copy in English & invoice will be downloaded + auto-delivered via email. See step-by-step procedure Status: Valid
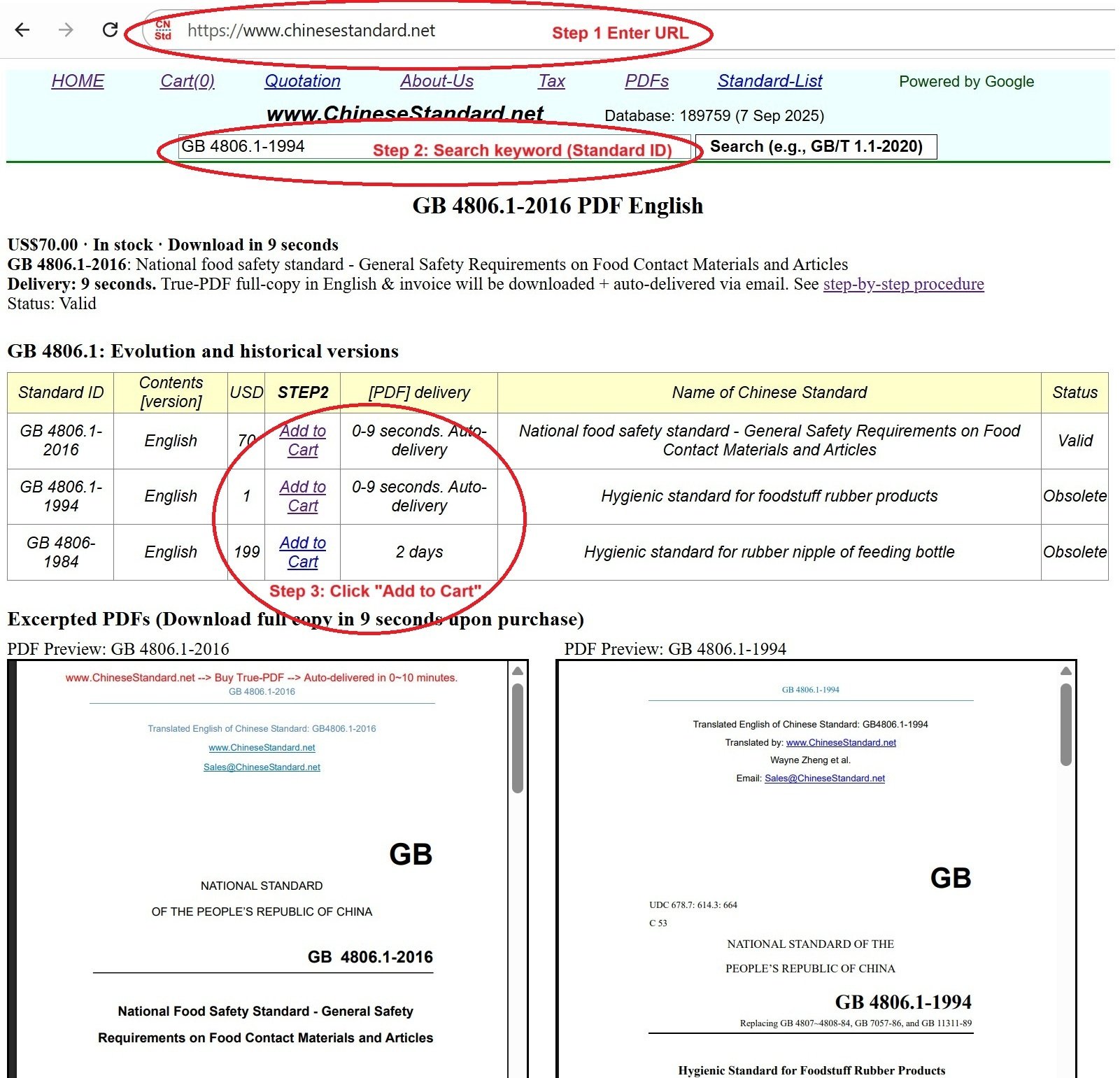
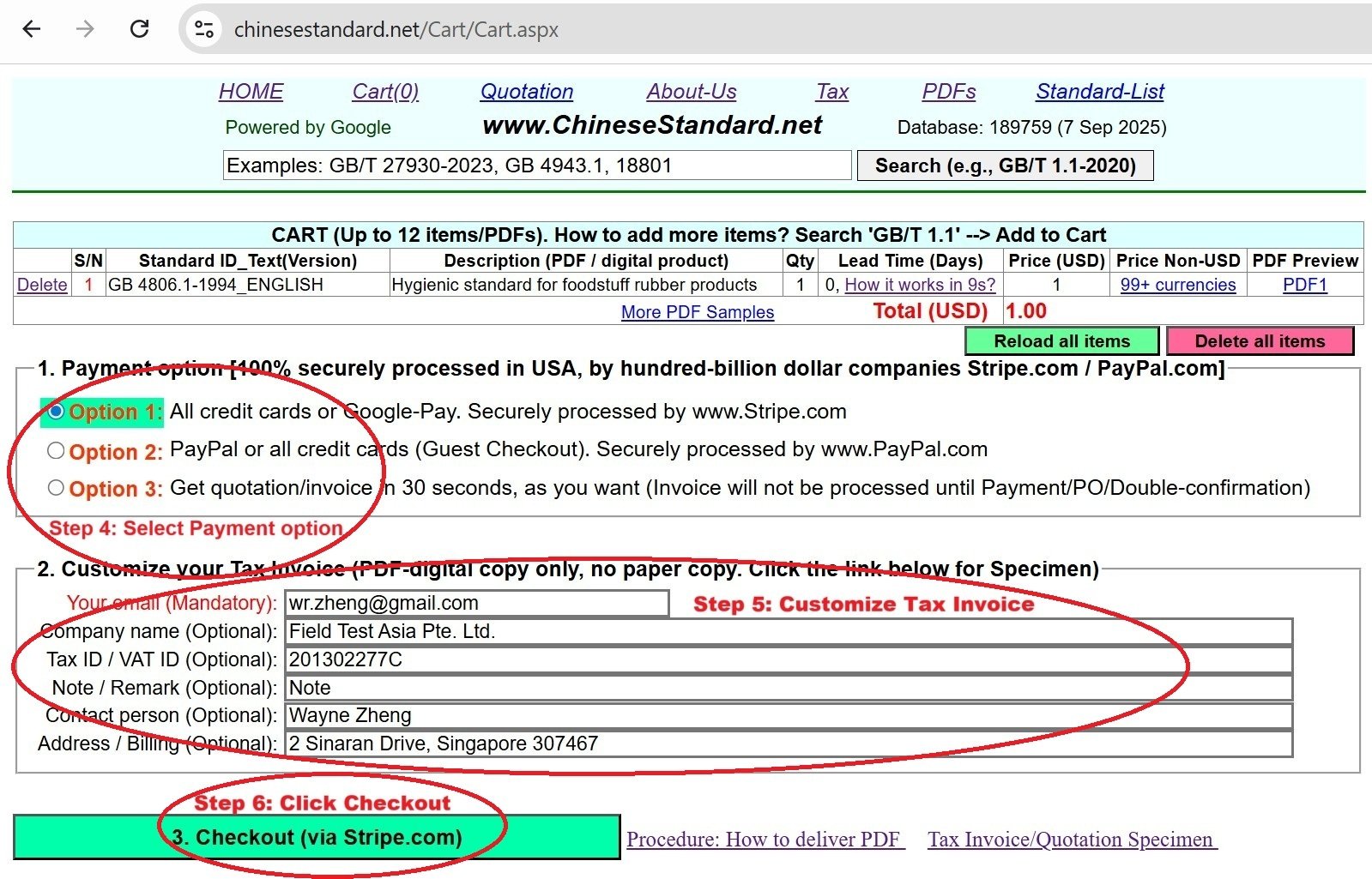
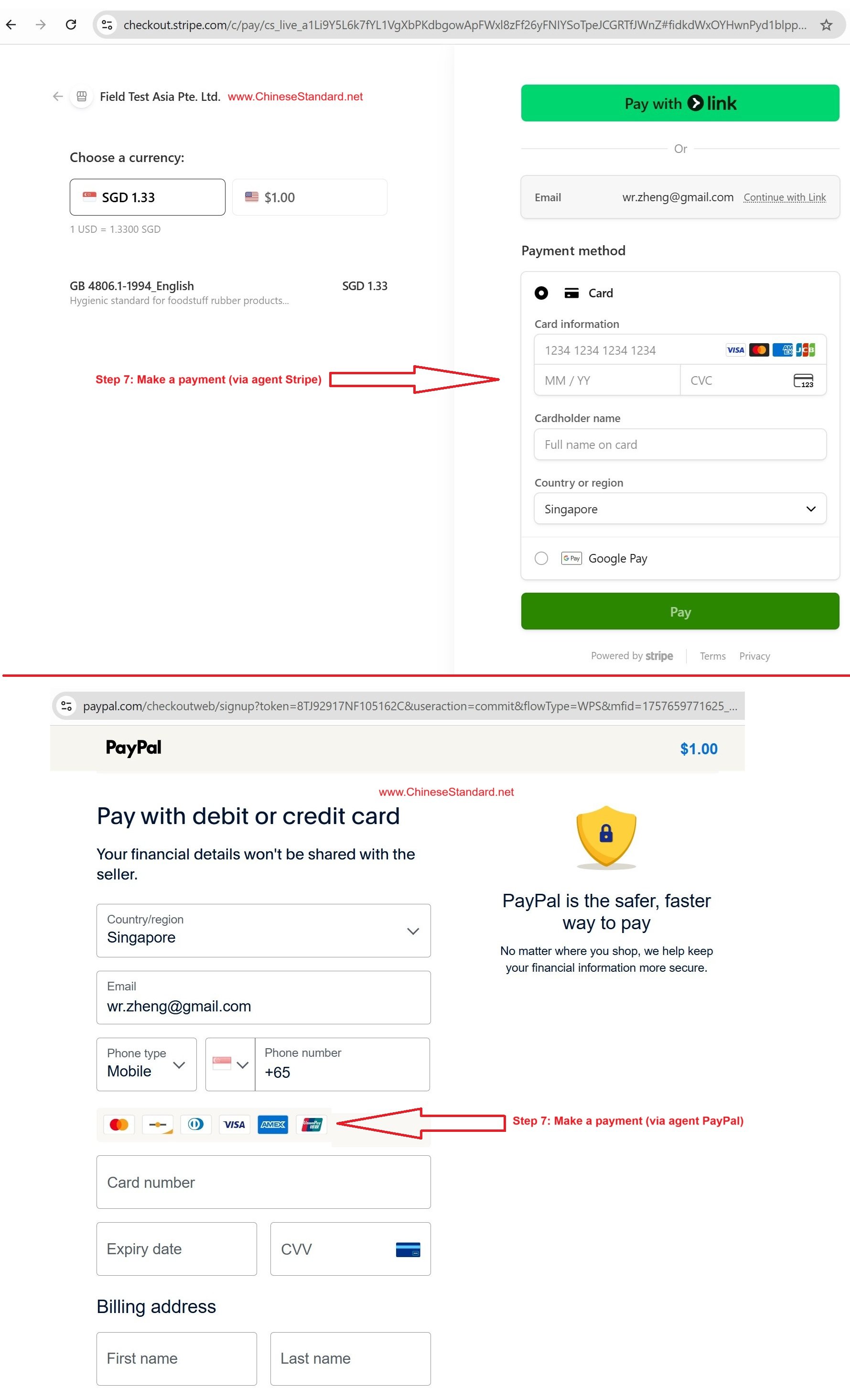
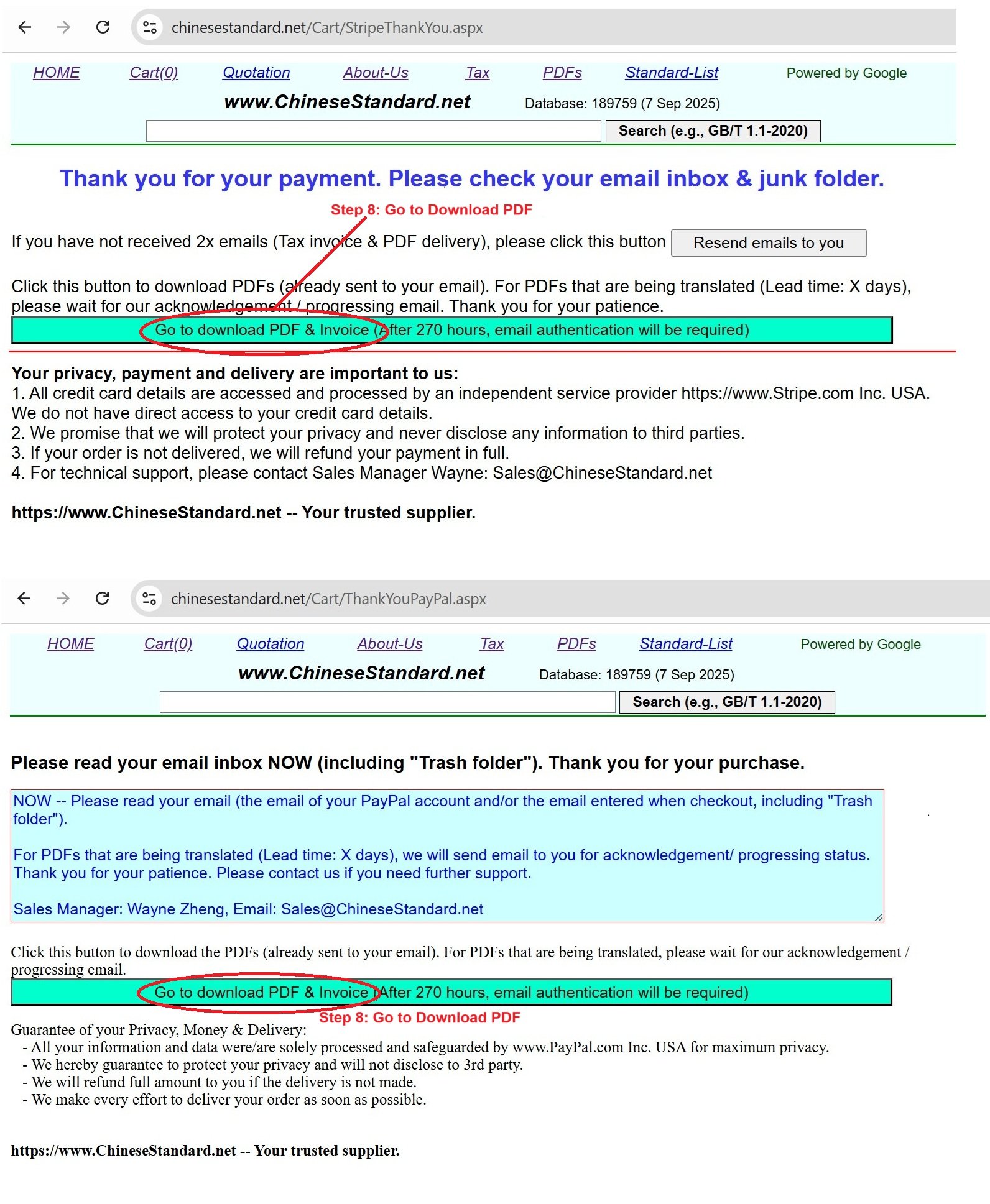
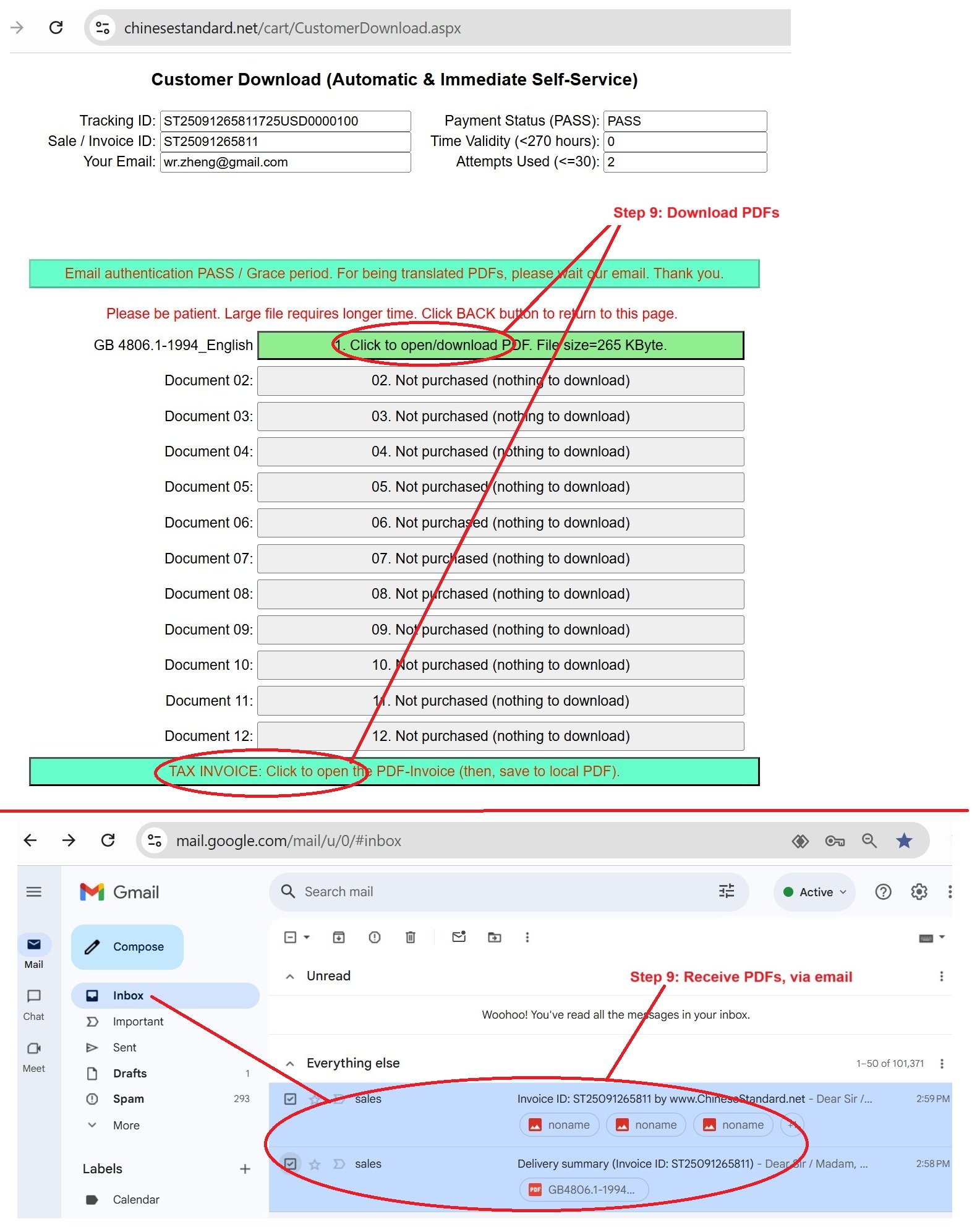
Similar standardsGB/T 43947-2024: General technical requirements for chassis-by-wire of low speed automated vehicle---This is an excerpt. Full copy of true-PDF in English version (including equations, symbols, images, flow-chart, tables, and figures etc.), auto-downloaded/delivered in 9 seconds, can be purchased online: https://www.ChineseStandard.net/PDF.aspx/GBT43947-2024 GB NATIONAL STANDARD OF THE PEOPLE’S REPUBLIC OF CHINA ICS 43.020 CCS T 20 General technical requirements for chassis-by-wire of low speed automated vehicle Issued on. APRIL 25, 2024 Implemented on. NOVEMBER 01, 2024 Issued by. State Administration for Market Regulation; Standardization Administration of the People’s Republic of China. Table of ContentsForeword... 4 1 Scope... 5 2 Normative references... 5 3 Terms and definitions... 6 4 General requirements... 9 5 General technical requirements... 12 6.Requirements for the chassis-by-wire system... 18 7 Test methods... 22 Bibliography... 261 ScopeThis document specifies the technical requirements, chassis-by-wire system requirements and test methods for chassis-by-wire of low speed automated vehicle. This document applies to low-speed chassis-by-wire used in pure electric non-road autonomous-service-vehicles with a maximum driving speed not exceeding 25 km/h.2 Normative referencesThe following documents are referred to in the text in such a way that some or all of their content constitutes requirements of this document. For dated references, only the version corresponding to that date is applicable to this document; for undated references, the latest version (including all amendments) is applicable to this document. GB/T 4208, Degrees of protection provided by enclosure (IP code) GB 16735, Road vehicle - Vehicle identification number (VIN) GB 18384-2020, Electric vehicles safety requirements GB/T 18385, Electric vehicles - Power performance - Test method GB/T 18387, Limits and test method of magnetic and electric field strength from electric vehicles3 Terms and definitionsFor the purposes of this document, the following terms and definitions apply. 3.1 autonomous-service-vehicle The special goods vehicle – equipped with a driving automation system and special automatic control supporting devices, and a cockpit-free structural feature – that is used in specific scenarios such as distribution, transportation, retail, patrolling, and cleaning. 3.2 chassis-by-wire A chassis with a certain load-bearing capacity that is composed of multiple systems such as a drive-by-wire system, a brake-by-wire system, and a steer-by-wire system, and is controlled by electrical signals and driven by an operating control or a driving automation system. Note. The operating control includes the manual operating control and the remote driving system. The manual operating control refers to the remote control with locking and unlocking functions. 3.3 drive-by-wire system A system that uses X-by-wire technology such as electronic circuits and communication transmission to receive instructions from the driving automation system or operating control to drive the chassis-by-wire of low speed automated vehicle.4 General requirements4.1 Design and manufacture requirements 4.1.1 The design and manufacture of chassis-by-wire of low speed automated vehicle shall ensure its safe operation. There shall be no unreasonable hazards during normal operation and maintenance according to the product instructions. 4.2 Emergency stop device 4.2.1 The chassis-by-wire of low speed automated vehicle shall be equipped with an emergency stop device or an emergency stop device drive interface. The signal triggered by the emergency stop device shall be able to be stored in the EDR or uploaded to the vehicle platform. 4.2.2 The emergency stop device shall be installed in a conspicuous and easily accessible location. 4.3 Collision protection The chassis-by-wire of low speed automated vehicle shall support the installation of a collision protection device, which shall be able to perform emergency braking when colliding with an obstacle, where the trigger force shall not exceed 50 N. 4.4 Operating control 4.5 Waterproof grade and electric shock protection 4.5.1 Electrical components that constitute a dangerous factor in a chassis-by-wire of low speed automated vehicle shall have fixed protective covers and housings, which shall only be removed or opened with tools during normal operation or when not in service. 4.6 Lighting and signaling 4.6.1 Lighting and optical signaling devices 4.8 Marking and plate 4.8.1 Warning text The chassis-by-wire of low speed automated vehicle shall be equipped with warning text and safety reminder markings, and the safety markings shall comply with the requirements of GB 24943. 4.8.2 Product plate5 General technical requirements5.1 General requirements 5.1.1 The chassis-by-wire of low speed automated vehicle shall pass through certain specific terrains (such as vertical obstacles, horizontal trenches, wading pools, etc.) according to design requirements. 5.2 Straight-line driving stability The chassis-by-wire of low speed automated vehicle shall be tested according to the method in 7.2, and the lateral running deviation distance shall be less than 2 m. 5.3 Requirements for environmental adaptability 5.4 Basic requirements for functional safety 5.4.1 The functional design of each safety-related system of the chassis-by-wire of low speed automated vehicle shall meet the following general requirements. 5.4.2 The safety-related systems of the chassis-by-wire of low speed automated vehicle shall be subject to functional safety risk analysis based on the application scenario. The risk analysis is as follows. 5.4.5 During the operation of the chassis-by-wire, each safety-related system shall be able to upload the operating status information in real time through the controller area network (CAN) or wireless network. 5.5 Information security requirements 5.7 Fault handling requirements 5.7.1 The chassis-by-wire of low speed automated vehicle shall be able to handle faults in a graded manner, including at least warning, power limit (speed limit), and parking functions. 5.8 Power supply and electrical system 5.8.1 Basic electrical properties 5.8.1.1 The safety requirements of the power battery pack or system of the chassis-by- wire of low speed automated vehicle shall comply with the relevant requirements of GB 38031; its electrical performance shall comply with the relevant requirements of GB/T 31486; the charging interface shall comply with the relevant requirements of GB/T 20234.1. 5.9 Communication and interface 5.9.1 Communication interface The chassis-by-wire of low speed automated vehicle shall be equipped with an open API interface and a CAN communication interface. 5.9.2 Communication protocol The chassis-by-wire of low speed automated vehicle shall be equipped with standardized protocols and interfaces for communicating with the driving automation system or other operating controls, and support CAN2.0A and CAN2.0B communication protocols. 6.Requirements for the chassis-by-wire system 6.1 Drive-by-wire system 6.1.1 Dynamic performance The dynamic performance of the chassis-by-wire of low speed automated vehicle shall meet the following requirements. 6.1.2 Drive control method The propulsion system of the chassis-by-wire of low speed automated vehicle shall have one or more control modes among throttle, torque, acceleration and speed control. 6.1.5 Climbing capacity The climbing capacity of the propulsion system of the chassis-by-wire of low speed automated vehicle shall meet the following requirements. 6.2 Brake-by-wire system 6.2.1 General requirements The chassis-by-wire of low speed automated vehicle shall have a service braking system and a parking braking system that meet the performance requirements, and the chassis- by-wire of low speed automated vehicle shall not deviate, slide, or lose steering when braking. 6.2.3 Parking brake 6.2.4 Brake interface 6.2.4.1 The chassis-by-wire of low speed automated vehicle shall provide a brake pressure or a deceleration control interface to support closed-loop control of the braking system under different loads. 6.2.4.2 The brake interface of the chassis-by-wire of low speed automated vehicle shall meet the following requirements. 6.3 Steer-by-wire system 6.3.1 General requirements The steering system of the chassis-by-wire of low speed automated vehicle shall meet the following requirements. 6.3.2 Steer-by-wire responsiveness The responsiveness of the steer-by-wire system of the chassis-by-wire of low speed automated vehicle shall meet the following requirements.7 Test methods7.1 Test site requirements Unless otherwise specified, all tests shall be carried out on a flat, hard, dry and clean cement or asphalt road, with an adhesion coefficient of no less than 0.7 and a wind speed of no more than 3 m/s. 7.3 Service brake test The chassis-by-wire of low speed automated vehicle under test moves in a straight line at a constant speed (v) of 5 km/h ± 1 km/h, 10 km/h ± 1 km/h, 15 km/h ± 1 km/h, 20 km/h ± 1 km/h, and 25 km/h ± 1 km/h for a certain distance. 7.4 Speed bump passability test Place speed bumps that meet the test requirements on the test road. The chassis-by-wire of low speed automated vehicle under test passes over the speed bumps at speeds (v) of 5 km/h ± 1 km/h and 10 km/h ± 1 km/h, respectively. Record whether the vehicle can pass over the speed bumps smoothly under no-load and full-load conditions, as shown in Figure 3 7.5 Ramp test 7.5.3 Power-off parking test on slope The chassis-by-wire of low speed automated vehicle under test runs on a slope that meets the slope requirements (when fully loaded, its climbing gradient shall be no less than 20%), as shown in Figure 6.After pressing the brake button, the vehicle stops and the power is cut off. 7.6 Waterproofing of the whole vehicle 7.6.1 Simulated cleaning For the entire chassis-by-wire of low speed automated vehicle, use the IPX5 hose nozzle in GB/T 4208 and clean water at a flow rate of 12.500 L/min ± 0.625 L/min to spray water toward all boundary lines in all possible directions. The spraying time shall be no less than 3 minutes, and the distance from the nozzle to the boundary line shall be 3.0 m ± 0.5 m. ......Source: Above contents are excerpted from the full-copy PDF -- translated/reviewed by: www.ChineseStandard.net / Wayne Zheng et al. Tips & Frequently Asked Questions:Question 1: How long will the true-PDF of English version of GB/T 43947-2024 be delivered?Answer: The full copy PDF of English version of GB/T 43947-2024 can be downloaded in 9 seconds, and it will also be emailed to you in 9 seconds (double mechanisms to ensure the delivery reliably), with PDF-invoice.Question 2: Can I share the purchased PDF of GB/T 43947-2024_English with my colleagues?Answer: Yes. The purchased PDF of GB/T 43947-2024_English will be deemed to be sold to your employer/organization who actually paid for it, including your colleagues and your employer's intranet.Question 3: Does the price include tax/VAT?Answer: Yes. Our tax invoice, downloaded/delivered in 9 seconds, includes all tax/VAT and complies with 100+ countries' tax regulations (tax exempted in 100+ countries) -- See Avoidance of Double Taxation Agreements (DTAs): List of DTAs signed between Singapore and 100+ countriesQuestion 4: Do you accept my currency other than USD?Answer: Yes. www.ChineseStandard.us -- GB/T 43947-2024 -- Click this link and select your country/currency to pay, the exact amount in your currency will be printed on the invoice. Full PDF will also be downloaded/emailed in 9 seconds.How to buy and download a true PDF of English version of GB/T 43947-2024?A step-by-step guide to download PDF of GB/T 43947-2024_EnglishStep 1: Visit website https://www.ChineseStandard.net (Pay in USD), or https://www.ChineseStandard.us (Pay in any currencies such as Euro, KRW, JPY, AUD).Step 2: Search keyword "GB/T 43947-2024". Step 3: Click "Add to Cart". If multiple PDFs are required, repeat steps 2 and 3 to add up to 12 PDFs to cart. Step 4: Select payment option (Via payment agents Stripe or PayPal). Step 5: Customize Tax Invoice -- Fill up your email etc. Step 6: Click "Checkout". Step 7: Make payment by credit card, PayPal, Google Pay etc. After the payment is completed and in 9 seconds, you will receive 2 emails attached with the purchased PDFs and PDF-invoice, respectively. Step 8: Optional -- Go to download PDF. Step 9: Optional -- Click Open/Download PDF to download PDFs and invoice. See screenshots for above steps: Steps 1~3 Steps 4~6 Step 7 Step 8 Step 9 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}