GB 11291.1-2011 PDF EnglishUS$175.00 · In stock · Download in 9 seconds
GB 11291.1-2011: Robots for industrial environments -- Safety requirements -- Part 1: Robot Delivery: 9 seconds. True-PDF full-copy in English & invoice will be downloaded + auto-delivered via email. See step-by-step procedure Status: Valid GB 11291.1: Historical versions
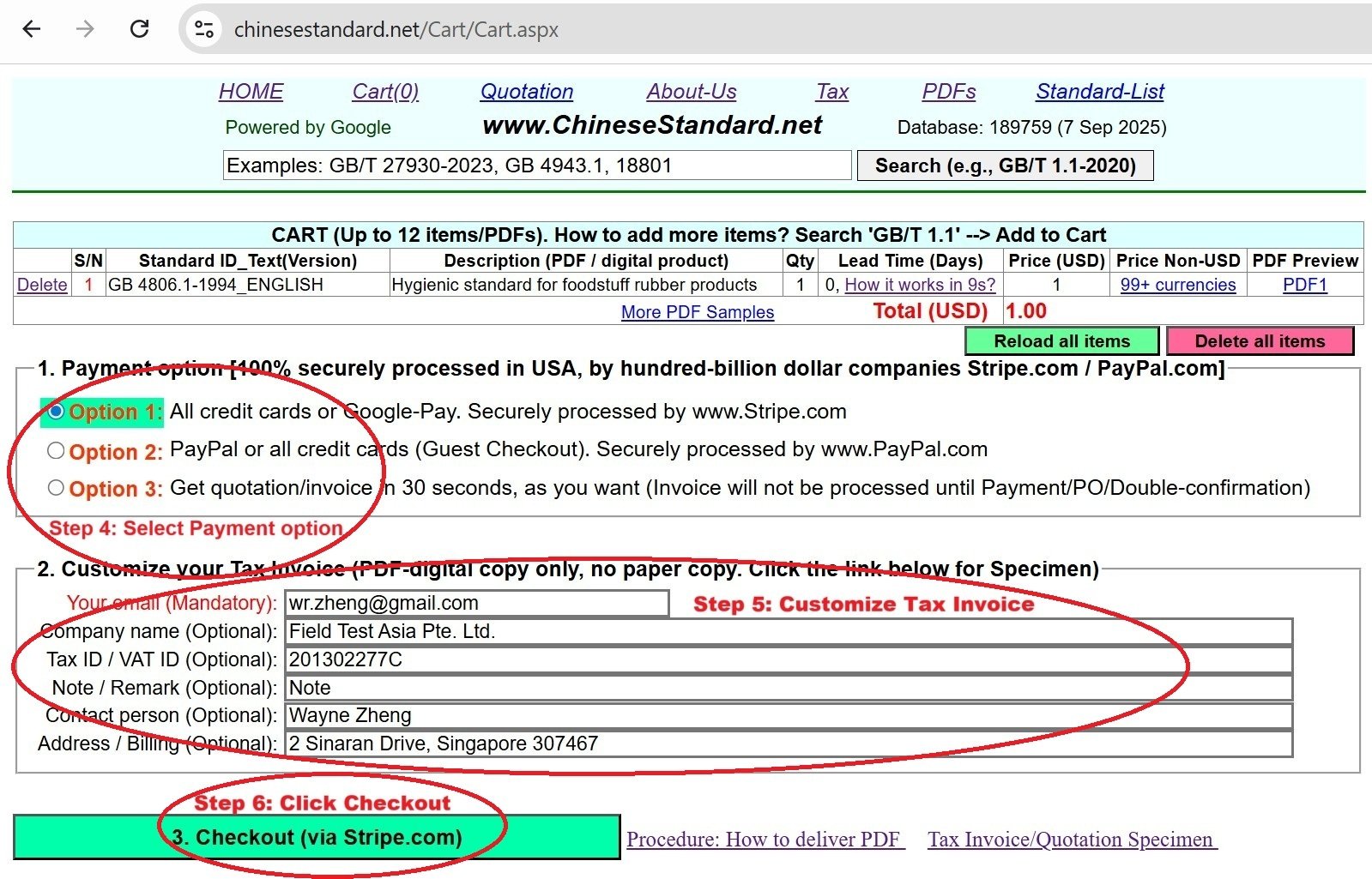
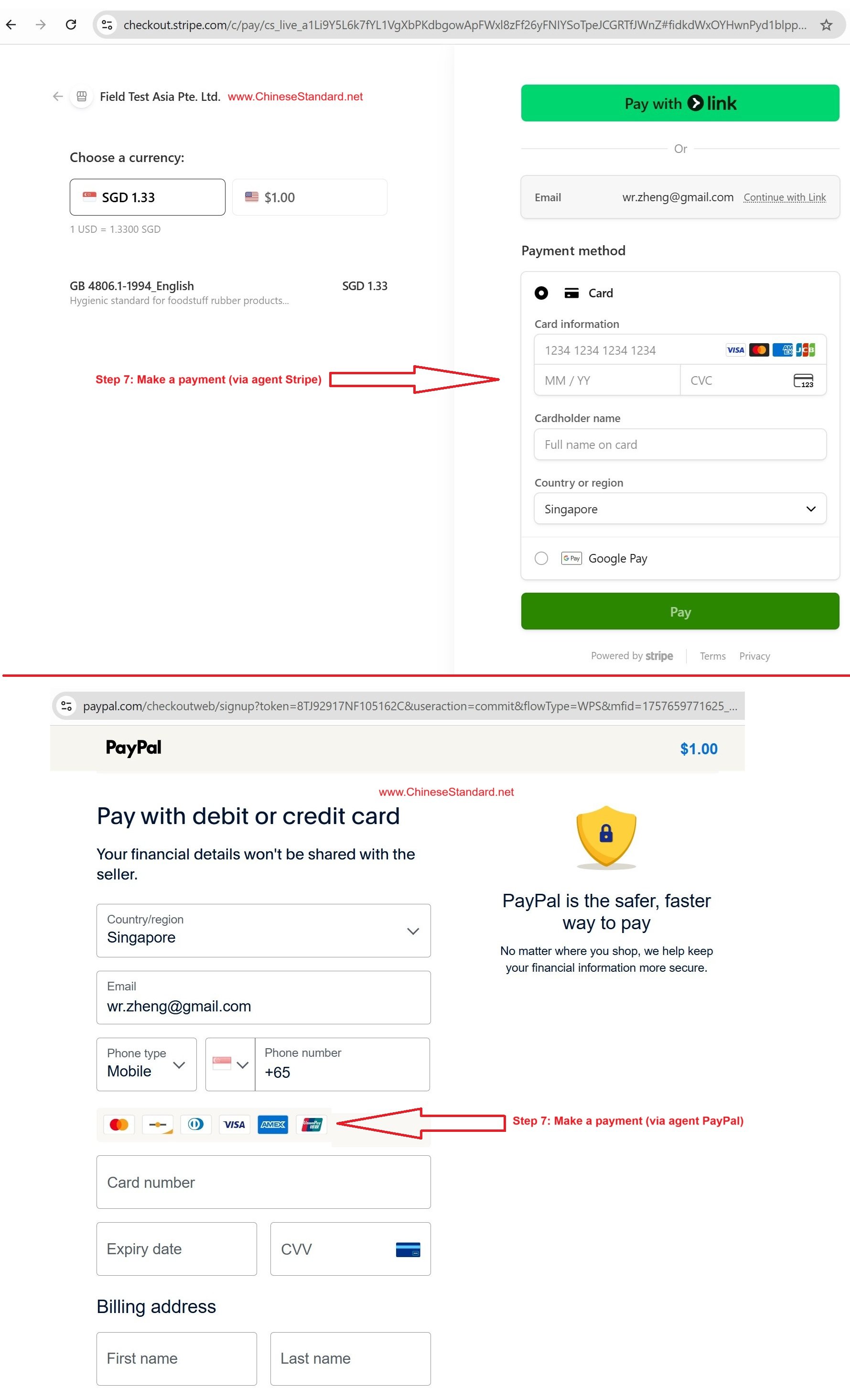
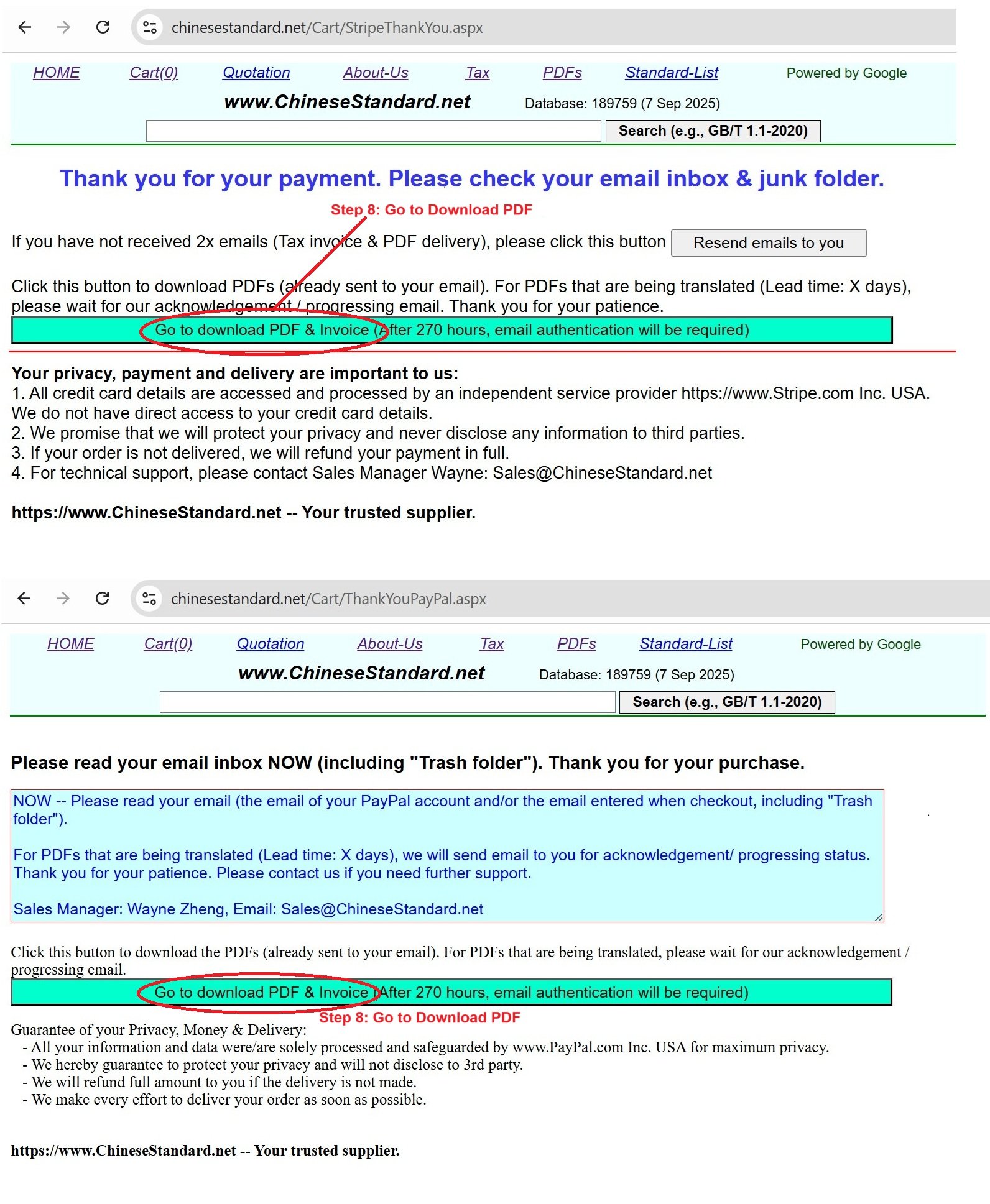
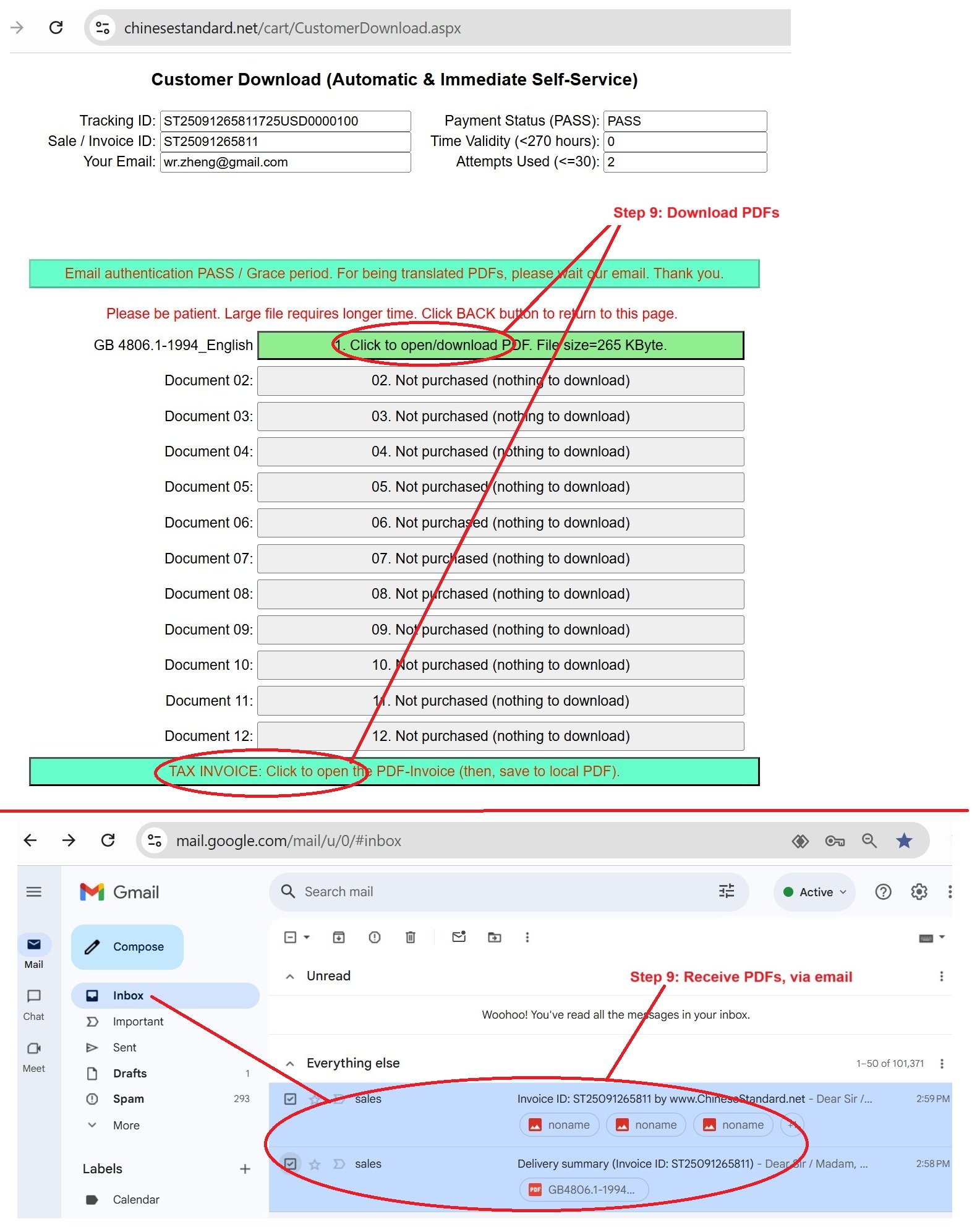
Similar standardsGB 11291.1-2011: Robots for industrial environments -- Safety requirements -- Part 1: Robot---This is an excerpt. Full copy of true-PDF in English version (including equations, symbols, images, flow-chart, tables, and figures etc.), auto-downloaded/delivered in 9 seconds, can be purchased online: https://www.ChineseStandard.net/PDF.aspx/GB11291.1-2011Robots for industrial environments.Safety requirements.Part 1.Robot ICS 25.040.30 J28 National Standards of People's Republic of China Replacing GB 11291-1997 Robots for industrial environments - Safety requirements Part 1.Robots Part 1.Robot (ISO 10218-1.2006, ISO 10218-1/Cor.1.2007, IDT) Issued on. 2011-05-12 2011-10-01 implementation Administration of Quality Supervision, Inspection and Quarantine of People's Republic of China Standardization Administration of China released Table of ContentsPreface Ⅰ Introduction Ⅱ 1 Scope 1 2 Normative references 1 3 Terms and definitions Hazard identification and risk assessment 4 5 5 design requirements and protection measures 6 6 15 use the information Appendix A (normative) lists 17 major risk Appendix B (normative) Stop time/distance metric 19 Annex C (informative) 3-position enabling device features 20 Annex D (informative) Optional Features 21 Methods Appendix E (normative) mode of operation mark 22 References 23ForewordAll technical content in this section is mandatory. GB 11291 "Robots for industrial environments - Safety requirements" is divided into the following sections. --- Part 1.Robot; --- Part 2.Robot systems and integration. This is Part 1 GB 11291's. This section drafted in accordance with GB/T 1.1-2009 given rules. This Part replaces GB 11291-1997 "industrial robot safety norms." This section of the main changes compared to GB 11291-1997 are as follows. --- This section updated some files to make them more in line with GB/T 15706-2007 and comply with the requirements of the use of Class C standard check Testing requirements and corresponding hazards. --- This section increased (but not limited to) new technical requirements, including those related to security control system performance, the robot stop work You can enable the device, program verification, wireless teach pendant guidelines, joint control, collaborative robots guidelines, and the latest design safety specification. This section identical with the international standard ISO 10218-1.2006 "Safety requirements for industrial environments - Part 1 robot. robot" (English version) and ISO 10218-1/Cor.1.2007 (revised English edition). For ease of use, this part of the editorial changes as follows. --- Uppercase acronym in English formerly reserved to remove ISO foreword; --- ISO 10218 will be changed to "GB 11291" and "" Robots for industrial environments - Safety requirements ''; will the "international standards" and ISO 10218-1 words "this section" and "GB 11291.1"; --- The Normative documents have been translated into national standards with international standards Renumber national standard number, and the corresponding national International standards adopted standard version number placed in parentheses after the number of national standards, ease of use and access; unconverted international standards Approved leave; --- Deletion of the original text does not meet the standard of written words. Correspondence between the consistency of the standards of international documents and normative references of the following documents. --- GB/T 12642-2001 industrial robot performance specifications and test methods (eqvISO 9283.1998); --- GB 16754-2008 Safety of machinery - Emergency stop design principles (ISO 13850.2006, IDT); --- GB/T 19876-2005 Safety of machinery and parts of the body close to the speed of the positioning of protective equipment (ISO 13855. 2002, MOD). This part is proposed by China Machinery Industry Federation. This part of the automation systems and integration by the National Standardization Technical Committee (SAC/TC159) centralized. This section is drafted. Beijing Machinery Industry Automation, Beijing University of Aeronautics and Astronautics. The main drafters of this section. Young book reviews, Yun Chao, Wang Sisi. This part of the standard replaces the previous editions are. --- GB 11291-1997.introductionGB 11291 is based on the recognition of industrial robots and industrial robot systems can lead to specific risks basis. GB 11291 is GB/T 15706.1-2007 standard Class C said. Note the machine, the level of risk, hazard and incident involved have been described in the context of GB 11291. Class C and Class A standard Class B standard or standards are different. For Class C in accordance with the standard design and manufacture of machinery, Class C standard terms Precedence over other standard terms. Related dangerous robot has been widely recognized. However, the use of different sources of danger robot system is often different, so the type of risk The automation process is directly related to the number and complexity of the robot installation. Depending on the type of robot use, purpose of use of the robot, Risks associated with the robot installation, programming, operation and maintenance of different ways, leading to the danger of these are different. Note 1.Not all danger described in GB 11291 are applicable to each robot. Similarly, the level of risk of a particular dangerous situations in different machine It is the world may differ. Thus, the provisions in GB 11291 safety requirements and/or protective measures for different robots may vary With, then it can carry out a risk assessment to determine what protective measures. In recognition of industrial robots for different purposes have different hazardous properties, GB 11291 is divided into two parts; Part 1 provides Security assurances guidance recommends that when designing and manufacturing the robot. Since the industrial robot application security by a particular robotic system integration Influence in the design and application, Part 2 will provide the robot integration, installation, functional testing, programming, operation, maintenance and repair of the people engaged in Members of security guidelines. Note 2.Since the industrial environment, noise is generally considered to be a hazard, in line with the provisions of 3.18 robot can not be considered the final product. The accord 3.20 robot system is defined taking into account noise hazard machine. Thus, in Section 2 GB 11291 of the regulations at the noise hazard Management measures. Robots for industrial environments - Safety requirements Part 1.Robots 1 Scope GB 11291 of the provisions of this part of the industrial robot (defined in Chapter 3) of the basic security design, protection measures and the use of information The requirements and guidelines. Describe industrial robots basic hazard related, and proposes to eliminate or substantially reduce the risk of these requirements. Noise as a potential hazard in this section do not relate, but are included in Section 2 GB 11291's. GB 11291 This part is suitable for industrial robots. Although the "Robots for industrial environments - Safety requirements" established safety principles can Other types of robots can be used, but this does not apply to non-industrial robots. Examples of non-industrial robot including (but not limited to In). Underwater, military and space robots, robot remote control assistive devices, prosthetics and other physically handicapped persons, micro-robots (displacement range Wai < 1mm), surgery or rehabilitation robots, and service and consumer robots. Note 1.The industrial robot system integration and installation requirements are contained in Part 2. Note 2.The special applications (welding, laser cutting, machining, etc.) may produce additional hazards in these dangerous design of the robot may need to be considered. 2 Normative references The following documents for the application of this document is essential. For dated references, only the dated version suitable for use herein Member. For undated references, the latest edition (including any amendments) applies to this document. GB 5226.1-2008 Safety of machinery - Electrical machinery and electrical equipment - Part 1.General requirements (IEC 60204-1.2005, IDT) GB/T 15706.1-2007 Safety of machinery - Basic concepts, general principles for design - Part 1.Basic terminology, methodology (ISO 12100-1.2003, IDT) GB/T 15706.2-2007 Safety of machinery - Basic concepts, general principles for design - Part 2.Technical principles (ISO 12100-2. 2003, IDT) GB/T 16855.1-2008 Safety of machinery - Safety-related control system components - Part 1.General principles for design (ISO 13849-1. 2006, IDT) GB/T 17799.2-2003 Electromagnetic compatibility - Generic standards - Immunity for industrial environments (IEC 61000-6-2.1999, IDT) GB 17799.4-2001 Electromagnetic compatibility - Generic standards Emission standard for industrial environments (IEC 61000-6-4.1997, IDT) ISO 9283.1998 Industrial robots - Performance criteria and test methods (Manipulatingindustrialrobots-Perfor- macecriteriaandrelatedtestmethods) ISO 14121.1999 Safety of machinery - Risk assessment principles (Safetyofmachinery-Principlesofriskassessment) ISO 13850 Safety of machinery - Emergency stop design principles (Safetyofmachinery-Emergencystop-Principlesfor design) ISO 13855 Safety of machinery and parts of the body close to the speed of the positioning of protective equipment (Safetyofmachinery-Positio- ningofprotectiveequipmentwithrespecttotheapproachspeedsofpartsofthehumanbody) 3 Terms and Definitions The following terms and definitions apply to this document. 3.1 Actuation control actuatingcontrol a) control device in the body. Example. Open the contact link. b) Start a lock (or unlock) device program. Example. dedicated key. 3.2 Automatic mode automaticmode One mode of operation the robot control system operating in accordance with the task program. [See GB/T 12643-1997, the definition 6.3.8.1] 3.3 Automatic operation automaticoperation Robot according to a predetermined program to perform its task program state. [See GB/T 12643-1997, the definition 6.5] 3.4 Cooperating colaborativeoperation Specially designed robots and people work together directly within the specified operating space states. 3.5 Collaborative Workspace colaborativeworkspace The workspace security space within the robot work cell, the robot in production activities and can complete tasks simultaneously. 3.6 Coordinated Motion coordinatedmotion Each robot axes reach the end of their smooth movement, or control the movement of each axis of the tool center point (TCP) specified (Line, circle, or other) path. 3.7 Cycle cycle Perform a task program. [See GB/T 12643-1997, the definition 7.22] 3.8 Driving source drivepower Energy robot drive or power source. 3.9 End effector endeffector In order to fulfill its mandate robot specifically designed and installed in the mechanical device at the interface. Example. holder, wrenches, torches, guns and the like. [See GB/T 12643-1997, the definition 4.11] 3.10 Energy energysource Any electrical, mechanical, hydraulic, pneumatic, chemical, thermal, potential energy, kinetic energy or other forms of power sources. 3.11 Dangerous movement hazardousmotion Any movement could cause personal injury. 3.12 Limiter limitingdevice By stopping or cause the robot to stop all movement restrictions (robot) means the maximum workspace, and the control device Procedures and tasks unrelated to the program. 3.13 Local control localcontrol In the system, only the machine's own control panel or teach pendant to the system or part of the system status of the operation. 3.14 Manually manualmode It enables location data points generated, control storage and reproduction. [See GB/T 12643-1997, the definition 6.3.8.2] 3.15 Teach pendant pendant, teachpendant It can be used to program the robot or the robot motion, and the handheld unit is connected with the control system. [See GB/T 12643-1997, the definition 6.8] 3.16 Program programme 3.16.1 Control program controlprogramme Ability to define robotic systems, motion control and response inherent in the instruction set. Note. This program is fixed, and the user generally can not be modified. [See GB/T 12643-1997, the definition 6.1.2] 3.16.2 Task program taskprogramme Instruction for the movement and auxiliary functions to define specific tasks the robot system compiled set. Note 1.This program is usually compiled by the user. Note 2.The use refers to the general scope of work, the task refers to the specific part of the use of inside. [See GB/T 12643-1997, the definition 6.1.1] 3.16.3 Task programming taskprogramming Preparation task program (see 3.16.2) behavior. [See GB/T 12643-1997, the definition 6.2.1] 3.16.4 Programmer programmer The preparation of the designated person task program. [See GB/T 12643-1997, the definition 3.17] 3.16.5 Program path programmepath When the mission program, TCP (tool center point) tracking path. 3.16.6 Program verification programmeverification To confirm the robot path and process performance while executing a task program. NOTE. Verify that the program path may include all or part of the path. You can execute a single instruction or training sequence. New applications and fine adjustment/edit To validate the program. 3.17 Protective stop protectivestop In order to allow safe movement and maintain an orderly termination of the program logic for operating a restart of interrupted form. 3.18 Robots, industrial robots robot, industrialrobot An operating machine is automatically controlled, reprogrammable, multipurpose, and three and three or more axes to be programmed. It may be fixed Or mobile for use in industrial automation. Note 1.The robot comprises. --- Manipulator (including driver); --- Controllers, including the teaching box and any communication interface (hardware and software). Note 2.It includes any additional axes controlled by the robot controller. Note 3.In this section, the following equipment may be considered as industrial robots. a) manually-guided robot; b) the mobile robot manipulator; c) cooperating robots. [See GB/T 12643-1997, the definition 3.6] 3.19 Robot actuator robotactuator Power conversion, liquid or gas can be caused by movement of the power mechanism. 3.20 Robot system, industrial robot systems robotsystem, industrialrobotsystem The system comprising. ---robot; --- End effector; --- For the robot to complete all the equipments or sensors tasks. NOTE. See the requirements of robotic systems ISO 10218-2. [See GB/T 12643-1997, the definition 3.14] 3.21 Linkage simultaneousmotion Under the control of a single control station, two or more simultaneous movement of the robot. They can be implemented using common mathematical relationship or coordination Synchronize. Example 1.The teaching box can be used as instances of a single control station. Example 2.You can be a master/slave coordination. 3.22 Single point of control singlepointofcontrol The robot motion can only be started and can not be the ability to launch another source undone by a robot control source. 3.23 Singularity singularity Two or more axes collinear robot cause robot motion and speed uncertain situation. 3.24 Deceleration control reducedspeedcontrol, slowspeedcontrol The speed limit in the robot ≤250mm/s or so people had time to get away from a dangerous movement stop the robot motion control the way. 3.25 Space space All parts of the robot movement axis passing through its three-dimensional space. 3.25.1 Maximum space maximumspace Robot moving parts that can be defined by the manufacturer of the passing space, plus at the end and by the movement of the workpiece can brushing space. [See GB/T 12643-1997, the definition 5.8.1] 3.25.2 Limited space restrictedspace By the limit means maximum space limited part. When the robot system any foreseeable failure, will not exceed the pre Set boundaries. [See GB/T 12643-1997, the definition 5.8.2] 3.25.3 Operating space operatingspace, operationalspace When the implementation of all program instructions by the task of movement, that part of the actual use of the limited space. [See GB/T 12643-1997, the definition 5.8.3] 3.25.4 Safe space safeguardedspace Perimeter security guard determined by the space. 3.26 Teach (programming) teach (programming) Programming is achieved by the following ways. a) manually guide the robot end effector; b) a hand-guided machine simulator; c) as required by the teaching box operation of mobile robots. [See GB/T 12643-1997, the definition 6.2.3] 3.27 Shows teacher teacher Preparation for the robot to complete the task required a specific set of instructions personnel. Note. See the programmer (3.16.4). 3.28 Tool center point toolcentrepoint (TCP) Reference point for the mechanical interface coordinate system set certain purposes. [See GB/T 12643-1997, the definition 5.9] 3.29 User user The use of robots and robot operator responsible entity. 4 hazard identification and risk assessment Appendix A lists the dangerous robot may arise. Hazard analysis should be conducted to determine any other possible danger. Dangers identified in the hazard identification, risk assessment should be conducted. This risk assessment should pay particular attention to the following conditions. Routine operations a) of the robot, including teach-in, maintenance, set up and clean; b) unexpected start; c) All persons entering the channel; d) reasonably foreseeable misuse of the robot; e) control system failures; f) application of the risk associated with a particular robot. First, the design should be adopted, or alternatively, then use the security and other remedial measures to eliminate or reduce risks. Any remaining risk should Other measures (such as. warning, marking, training) to reduce. Chapter 5 requirements by identifying risks to Appendix A, the use of security measures (with the GB/T 15706.1-2007 and GB/T 15706.2-2007 in Figures 1 and 2 consistency) obtained by the iterative process. Note. GB/T 15706-2007 and ISO 14121.1999 performs hazard identification and risk reduction proposed requirements and guidance. 5 design requirements and protection measures 5.1 General 15706.1-2007 should be based on principles relating to dangerous GB/T to design robots. GB 11291 of the present invention relates to a part not Significant danger (such as sharp edges). Design and manufacture of robots and robotic systems should meet the following requirements. Note 1.The following (but not limited to) test method to meet the requirements of this chapter. --- A. visual inspection; --- B. actual test; --- C. measurement; --- D. observation in operation; --- E. Analysis of a circuit diagram. Note 2.The test method recommended in this chapter various requirements in every holiday with [A, B, C,] in the form indicated, corresponding to the methods listed above. 5.2 General requirements 5.2.1 power transmitting member Use fixed or mobile guards to prevent the risk of the motor shaft, gears, belts or chains and other parts caused. Mobile protective equipment Set and dangerous movement should interlocked so that the dangerous movement is stopped before harm occurs. Safety interlock system shall comply with the requirements of 5.4. Note. [5.1 Note 1 A, B, C]. 5.2.2 loss of power or change Loss or change of power should not be dangerous. Restart the power, should not cause any movement. Of the end should be designed and manufactured electrical, loss or change of hydraulic, pneumatic or vacuum power is not dangerous. Otherwise should mention For other security methods to prevent the risk of the occurrence. Tool change system design and installation should only release the tool at the designated locations, and the tool should not release dangerous. Note 1.See GB 5226.1-2008 power requirements. Note 2.[5.1 Note 1 B, E]. 5.2.3 component failure Design of robot components, manufacturing, packing or protection should ensure that hazardous due to damage or loose or release of stored energy will cause minimal. Note. [5.1 Note 1 A, B, D]. 5.2.4 Energy It shall provide any isolation of electrical, mechanical, hydraulic energy, pneumatic energy, chemical energy, thermal energy, potential energy, kinetic energy or other dangerous methods. This approach should be locked in place or the ability to disconnect energy have protection. Note. [5.1 Note 1 A, B, C, E]. 5.2.5 Energy Storage So that the risk of a controlled release of energy storage measures should be provided. It should be labeled to identify the hazardous energy storage. Note 1.The accumulator can be pneumatic and hydraulic accumulator, a capacitor, a battery, a spring balance flywheel. Note 2.[5.1 Note 1 B, D, E]. 5.2.6 Electromagnetic compatibility (EMC) Design and manufacture of robots should be consistent with GB/T 17799 requirements in order to prevent electromagnetic interference (EMI), radio frequency interference (RFI) and static Electrostatic discharge (ESD) and the impact of movements or dangerous situations. Note 1.See GB/T 17799.2-2003 and GB 17799.4-2001. Note 2.[5.1 Note 1 A, B, C, E]. 5.2.7 Electrical equipment Design and manufacture of electrical equipment should meet the robot GB 5226.1-2008 the relevant requirements. Note. [5.1 Note 1 A, B, E]. 5.3 actuator control 5.3.1 General Turn on the power or movement of the actuating device designed and manufactured to meet the performance criteria should be mentioned in 5.3.2 to 5.3.5. 5.3.2 accidental operation Protection Manufacture and installation should prevent accidental operation of the actuator control device. Example. should be set in place a protective button or key selector switch. Note. [5.1 Note 1 A, B]. 5.3.3 Status Indication Actuated state control means (for example, boot, fault detection, automatic operation) should give directions. Note. [5.1 Note 1 A, B, D]. 5.3.4 label Actuation control device should be labeled to clearly indicate its function. Note. [5.1 Note 1.A]. 5.3.5 single point of control Design and manufacture of robot control system should be in native teaching box or other means for controlling the robot teaching can not be any other Control source start its movement or change of the control mode. Note. [Note 1 in 5.1 B, D, E]. 5.4 safety-related control system performance (hardware/software) 5.4.1 General Safety-related control systems (electrical, hydraulic, pneumatic and software) should at least meet the performance criteria set out in 5.4.2, unless the risk assessment The results of the assessment to determine an alternative performance criteria (see 5.4.3) is appropriate. In the information provided with the device, it should be clearly explained The piece of equipment that meets the safety-related control system performance. For purposes of this section, the relevant safety and performance control system according to GB/T 16855.1-2008 in the category were Instructions. Provide alternative performance requirements (such as the control reliability, performance level and safety integrity level) Other criteria may also be used. Use these standards to design-related and security control system, care should be taken to ensure that receive the same level of risk reduction. 5.4.2 Performance requirements When required safety-related control systems, and safety-related parts shall be designed to. Single fault a) any member should not lead to loss of safety function; b) as long as is reasonably practicable, the single fault shall be made before the next demand or a safety feature to be detected; c) a single failure occurs, always has security features, and the state security should be maintained until the failure has been resolved; d) all reasonably foreseeable failure should be detected. This requirement is part of GB/T 16855.1-2008 category as described in 3. Note 1.This single fault detection does not mean that the requirements of all faults have been found. Thus, accumulation of undetected faults may lead to accidental machine Output and dangerous situations. Examples of possible measures for fault detection are. Check the connection sport relay contacts or monitoring of redundant electrical outputs. Should be done An appropriate failure mode analysis, to confirm that all reasonably foreseeable failures are taken into account. Note 2.[5.1 Note 1 B, D, E]. 5.4.3 Other control system performance criteria Results robot and its intended use integrated risk assessment may determine the safety-related control system needed Performance requirements, the performance requirements for Category 3 is not, but for the Category 2 or category 4.Other performance criteria in GB/T 16855.1-2008 explained. Especially should ascertain which one is selected, and the use of resources affected devices provided with these other security-related performance criteria in Feed should include appropriate restrictions and warnings. Note. [Note 1 in 5.1 B, D, E]. 5.5 robot stop function 5.5.1 General Each robot should have a protective stop function and a separate emergency stop function. These measures should function with an external protection device connected CONSTRUCTION. Appendix D, provides an emergency stop signal output optionally. Table 1 emergency stop and the protective stop function was compared. Comparison Table 1 emergency stop and protective stop Emergency protective stop Occasions operator fast Accessible path is determined by the safety distance rules Starting manual automatic or manual Safety System Performance GB/T 16855.1-2008 in Category 3, or by the risk assessment Assessment decisions GB/T 16855.1-2008 in Category 3, or by the risk assessment Assessment decisions Table 1 (continued) Emergency protective stop Manual or automatic reset only manually Frequent use frequency. used only in emergency situations variable. each cycle with or without frequent use The removal of all hazardous energy control can be dangerous protection Note. [Note 1 in 5.1 B, D, E]. 5.5.2 Emergency stop function Each robot can be started or cause other dangerous situations stations should have a manual emergency stop function, the emergency stop function shall. a) comply with the requirements of section 5.4 and GB 5226.1-2008 section 9.2.5.4.2 of; b) priority over other robot control; c) suspend all danger; d) cutting robot drives a drive source; e) eliminate any other dangerous by the robot control; f) remains in effect until reset; g) can only be reset manually, not restart after a reset, only allowed to start again. According to GB 5226.1-2008 9.2.2 in risk assessment, should be determined to select a category 0 or category 1 stop function. When the emergency stop output signal is provided. --- Output signal remains valid after the removal robot power; --- If the output signal power after the removal of the robot does not work, should produce a stop signal. Em... ......Source: Above contents are excerpted from the full-copy PDF -- translated/reviewed by: www.ChineseStandard.net / Wayne Zheng et al. Tips & Frequently Asked Questions:Question 1: How long will the true-PDF of English version of GB 11291.1-2011 be delivered?Answer: The full copy PDF of English version of GB 11291.1-2011 can be downloaded in 9 seconds, and it will also be emailed to you in 9 seconds (double mechanisms to ensure the delivery reliably), with PDF-invoice.Question 2: Can I share the purchased PDF of GB 11291.1-2011_English with my colleagues?Answer: Yes. The purchased PDF of GB 11291.1-2011_English will be deemed to be sold to your employer/organization who actually paid for it, including your colleagues and your employer's intranet.Question 3: Does the price include tax/VAT?Answer: Yes. Our tax invoice, downloaded/delivered in 9 seconds, includes all tax/VAT and complies with 100+ countries' tax regulations (tax exempted in 100+ countries) -- See Avoidance of Double Taxation Agreements (DTAs): List of DTAs signed between Singapore and 100+ countriesQuestion 4: Do you accept my currency other than USD?Answer: Yes. www.ChineseStandard.us -- GB 11291.1-2011 -- Click this link and select your country/currency to pay, the exact amount in your currency will be printed on the invoice. Full PDF will also be downloaded/emailed in 9 seconds.Question 5: Should I purchase the latest version GB 11291.1-2011?Answer: Yes. Unless special scenarios such as technical constraints or academic study, you should always prioritize to purchase the latest version GB 11291.1-2011 even if the enforcement date is in future. Complying with the latest version means that, by default, it also complies with all the earlier versions, technically.How to buy and download a true PDF of English version of GB 11291.1-2011?A step-by-step guide to download PDF of GB 11291.1-2011_EnglishStep 1: Visit website https://www.ChineseStandard.net (Pay in USD), or https://www.ChineseStandard.us (Pay in any currencies such as Euro, KRW, JPY, AUD).Step 2: Search keyword "GB 11291.1-2011". Step 3: Click "Add to Cart". If multiple PDFs are required, repeat steps 2 and 3 to add up to 12 PDFs to cart. Step 4: Select payment option (Via payment agents Stripe or PayPal). Step 5: Customize Tax Invoice -- Fill up your email etc. Step 6: Click "Checkout". Step 7: Make payment by credit card, PayPal, Google Pay etc. After the payment is completed and in 9 seconds, you will receive 2 emails attached with the purchased PDFs and PDF-invoice, respectively. Step 8: Optional -- Go to download PDF. Step 9: Optional -- Click Open/Download PDF to download PDFs and invoice. See screenshots for above steps: Steps 1~3 Steps 4~6 Step 7 Step 8 Step 9 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}