GB/T 12642-2013 PDF EnglishUS$1195.00 · In stock · Download in 9 seconds
GB/T 12642-2013: Industrial robots -- Performance criteria and related test methods Delivery: 9 seconds. True-PDF full-copy in English & invoice will be downloaded + auto-delivered via email. See step-by-step procedure Status: Valid GB/T 12642: Historical versions
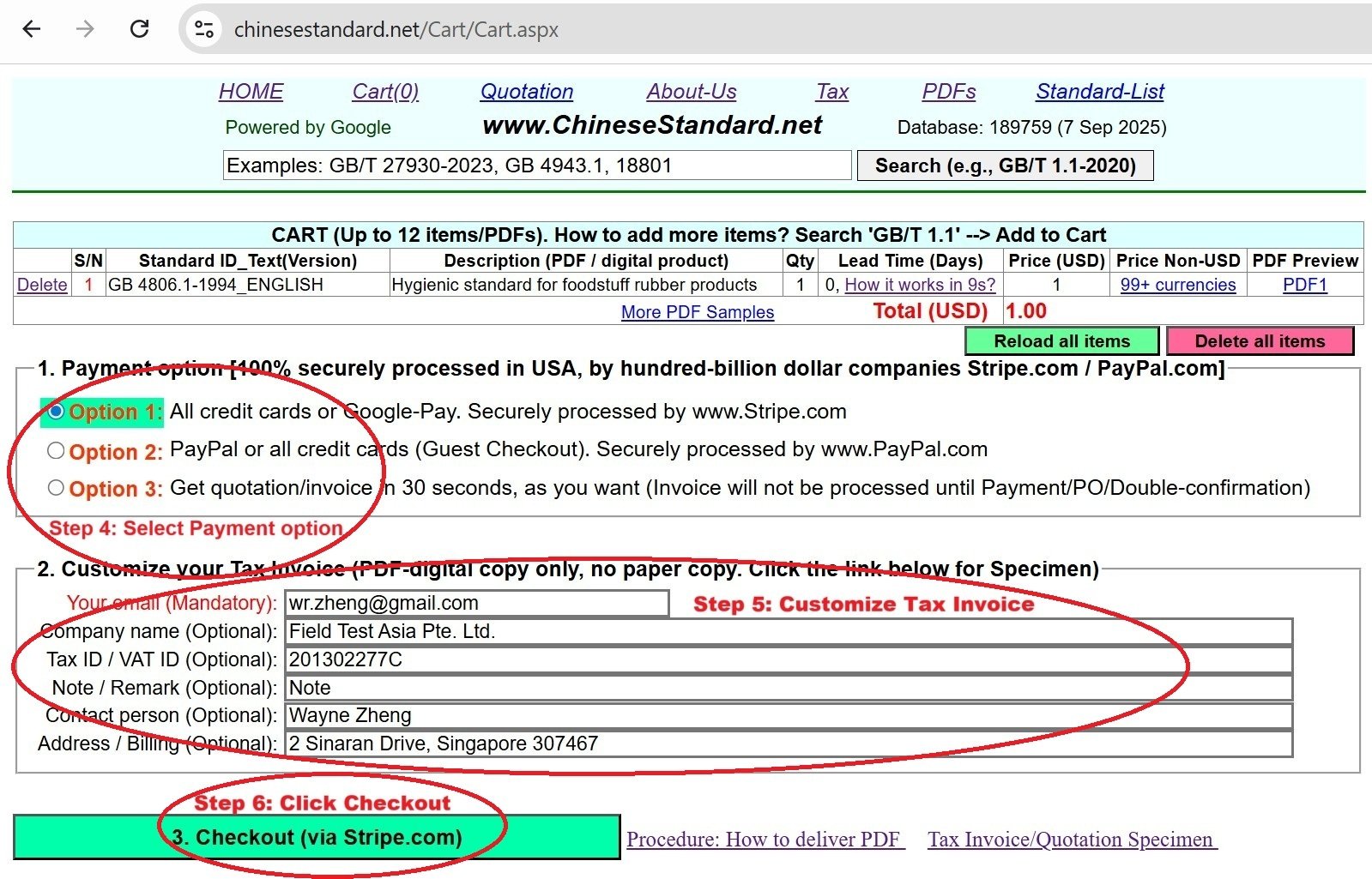
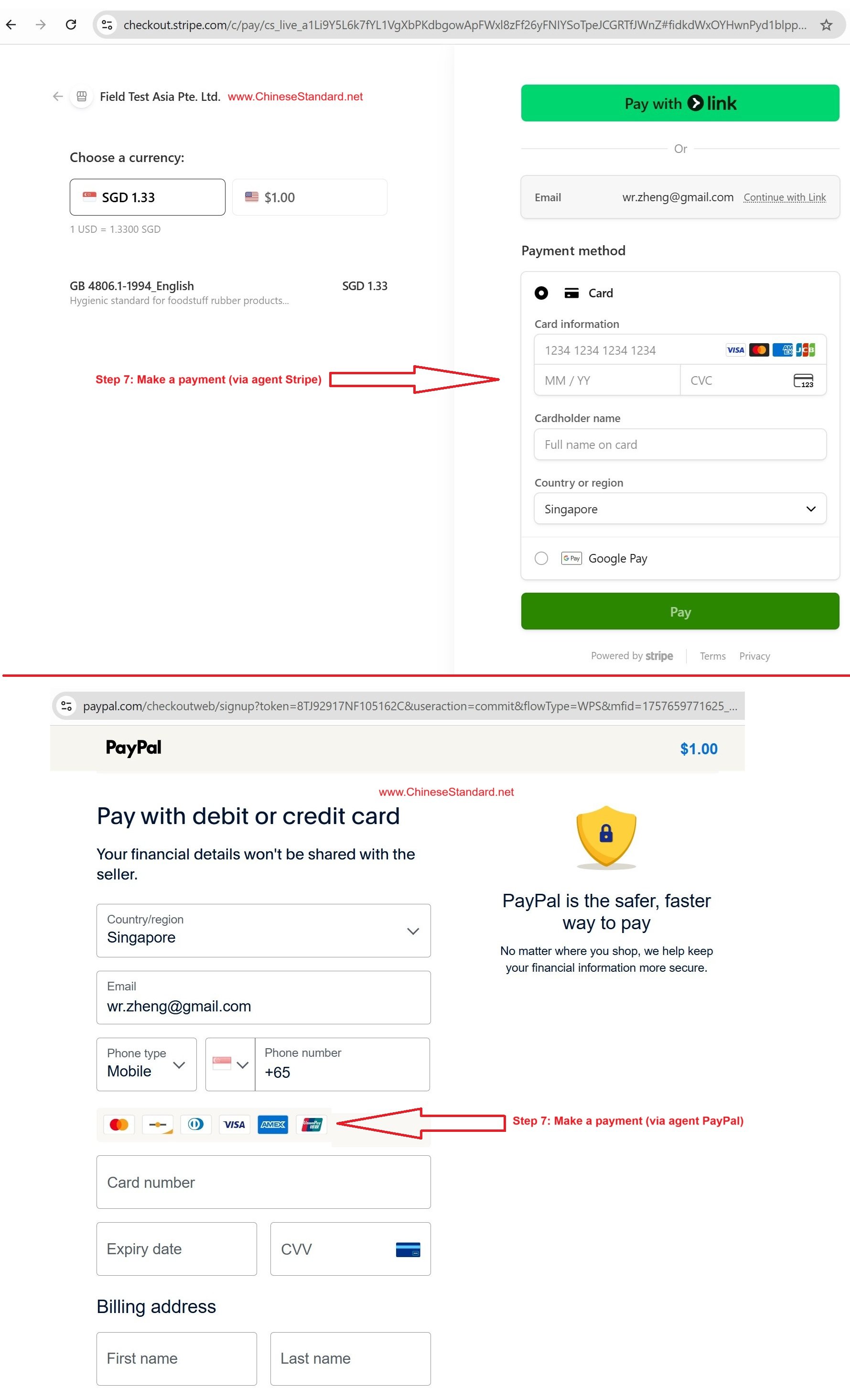
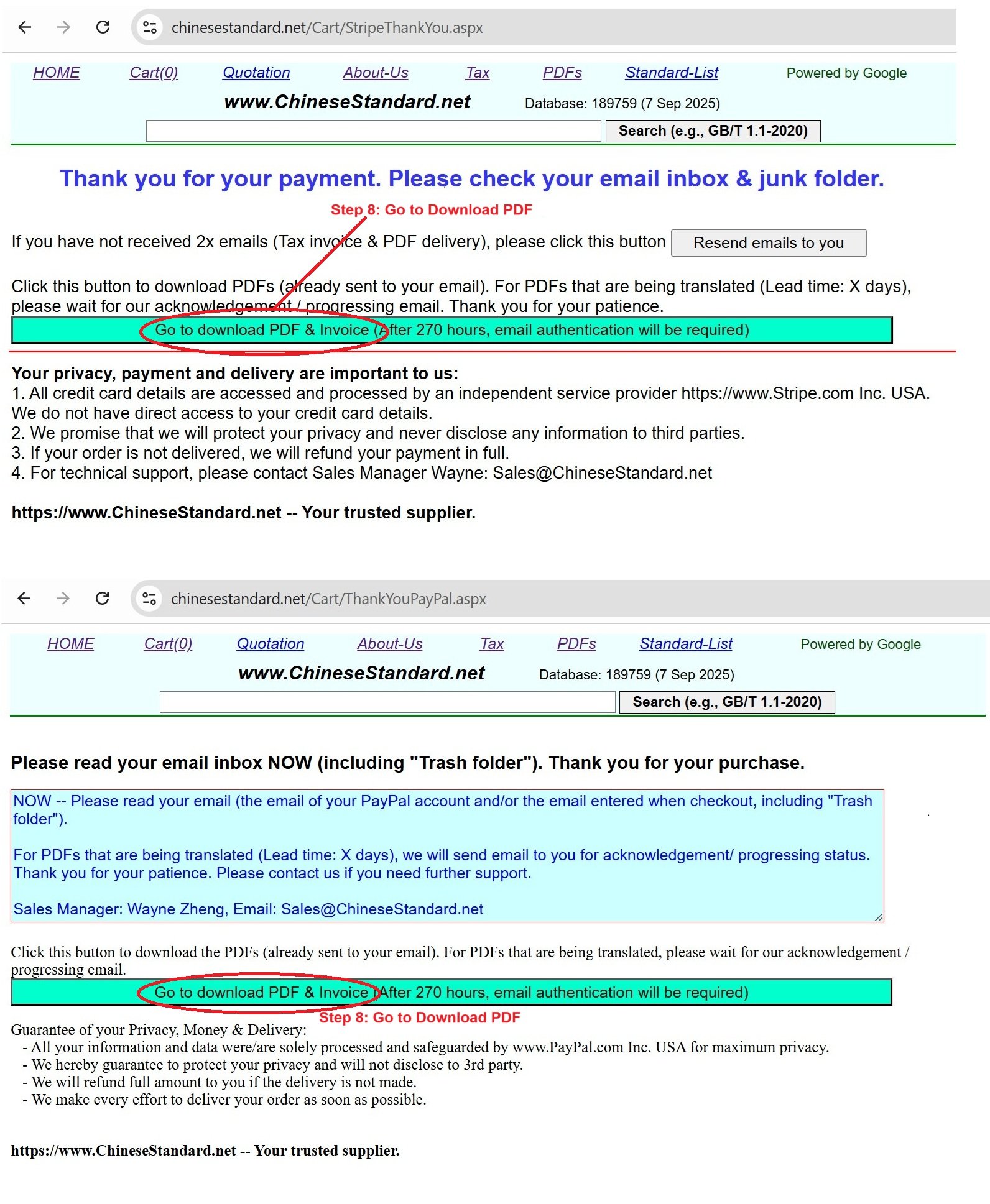
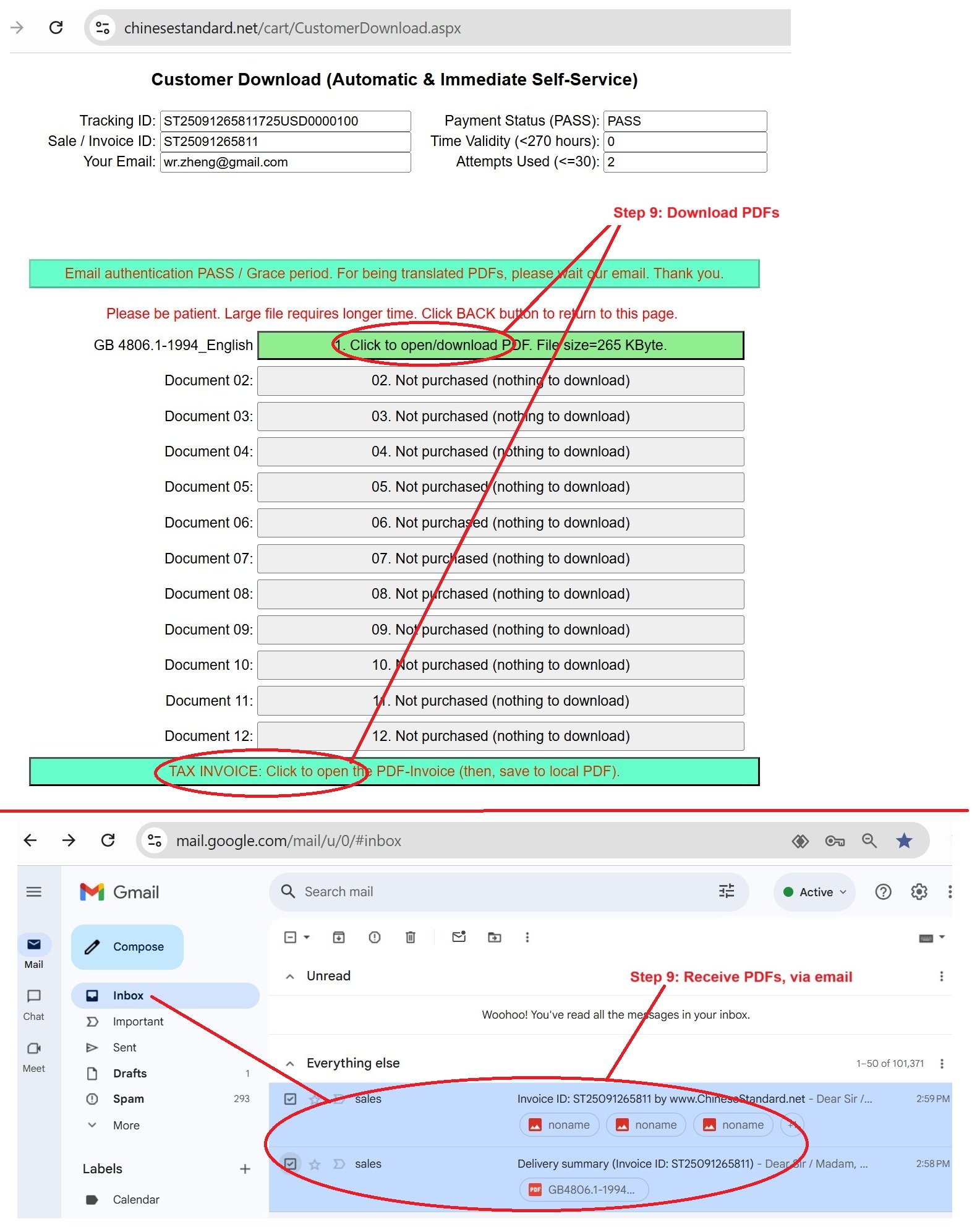
Similar standardsGB/T 12642-2013: Industrial robots -- Performance criteria and related test methods---This is an excerpt. Full copy of true-PDF in English version (including equations, symbols, images, flow-chart, tables, and figures etc.), auto-downloaded/delivered in 9 seconds, can be purchased online: https://www.ChineseStandard.net/PDF.aspx/GBT12642-2013GB NATIONAL STANDARD OF THE PEOPLE’S REPUBLIC OF CHINA ICS 25.040.30 J 28 GB/T 12642-2013 / ISO 9283.1998 Replacing GB/T 12642-2001 Industrial Robots – Performance Criteria and Related Test Methods (ISO 9283.1998, IDT) Issued on. NOVEMBER 12, 2013 Implemented on. MARCH 15, 2014 Issued by. General Administration of Quality Supervision, Inspection and Quarantine; Standardization Administration of PRC. Table of ContentsForeword... 3 Introduction... 5 1 Scope... 6 2 Normative References... 7 3 Terms and Definitions... 7 4 Units... 8 5 Abbreviations and Symbols... 8 6 Performance Testing Conditions... 10 7 Pose Characteristics... 21 8 Path Characteristics... 39 9 Minimum Posing Time... 49 10 Static Compliance... 50 11 Application Specific Performance Criteria... 51 12 Test Report... 52 Annex A (Normative) Parameters for Comparison Tests... 54 Annex B (Informative) Guide for Selection of Performance Criteria for Typical Applications... 59 Annex C (Informative) Example of a Test Report... 61 Annex NA (Informative) Test Method Based on Industrial Robot Performance in GB/T 12642... 67 Bibliography... 84ForewordThis Standard was drafted as per the rules specified in GB/T 1.1-2009. This Standard replaced GB/T 12642-2001 Industrial Robots - Performance Criteria and Related Test Methods. Compared with GB/T 12642-2001, the major technical changes of this Standard are as follows. --- Delete the original “ISO Foreword” (“ISO Foreword" of the 2001 Edition); --- Add the unit "rpm" (see Clause 4 of this Editon; Clause 4 of the 2001 Edition); --- Adjust the order of abbreviations and symbols (see Clause 5 of this Edition; Clause 5 of the 2001 Edition); --- Add 6.12 performance test method for industrial robots (see 6.12 of this Edition; Clause 6 of the 2001 Edition); --- Modify the formula in 7.2.2 (see 7.2.2 of this Edition; 7.2.2 of the 2001 Edition); --- Modify the formula in 7.3.3 (see 7.3.3 of this Edition; 7.3.3 of the 2001 Edition); --- Change Table C.4 "Position stabilization time and overshoot" in Appendix C into "Position stabilization time and overshooting amount" (see Table C.4 of this Edition; Table C.4 of the 2001 Edition); --- In order to facilitate application, add the informative Appendix NA "Performance test method for industrial robots based on GB/T 12642" (see Appendix NA); --- Add Bibliography (see Bibliography). This Standard adopted translation method to equivalently use ISO 9283.1998 Manipulating Industrial Robots – Performance Criteria and Related Test Methods. In order to cooperate with the use of this Standard, we have included the main content of ISO/TR 13309 as Appendix NA of this Standard. The Chinese documents that have consistent correspondence with the international documents referenced in this Standard are as follows. --- GB/T 12643-1997 Industrial robots – Vocabulary (eqv ISO 8373.1994) --- GB/T 12644-2001 Industrial robots - Presentation of characteristics (eqv ISO 9946.1999) --- GB/T 16977-1997 Industrial robots - Coordinate systems and motion nomenclature (eqv ISO 9787.1990) This Standard was proposed by China Machinery Industry Federation. This Standard shall be under the jurisdiction of National Technical Committee on Automation System and Integration of Standardization Administration (SAC/TC 159). Drafting organizations of this Standard. Beijing Research Institute of Automation for Machinery Industry; Guangzhou CNC Equipment Co., Ltd.; and Beijing Institute of Technology. Chief drafting staffs of this Standard. Yang Shuping, Jin Li, Wang Haidan, Wang Sisi, and Lu Jilian. The historical edition replaced by this Standard is as follows. --- GB/T 12642-2001.1 ScopeThis Standard describes methods of specifying and testing the following performance characteristics of manipulating industrial robots.2 Normative ReferencesThe following documents are essential to the application of this Document. For the dated documents, only the versions with the dates indicated are applicable to this Document; for the undated documents, only the latest version (including all the amendments) is applicable to this Document.3 Terms and DefinitionsFor the purposes of this Document, the terms and definitions given in ISO 8373.1994 and the following apply.4 UnitsUnless otherwise stated, all dimensions are as follows.5 Abbreviations and SymbolsFor the purposes of this Standard, the following abbreviations and symbols apply.6 Performance Testing ConditionsThe performance characteristics as specified by the manufacturer and determined by the related test methods in this Standard, are valid only under the environmental and normal operating conditions as stipulated by the manufacturer. The tests described in this Standard may be applied in whole or in part, depending upon the robot type and requirements (application).7 Pose CharacteristicsPose accuracy and repeatability characteristics, as defined in this clause, quantify the differences which occur between a command and attained pose, and the fluctuations in the attained poses for a series of repeat visits to a command pose.8 Path CharacteristicsPath accuracy characterizes the ability of a robot to move its mechanical interface along the command path in the same direction n times. Cornering overshoot is defined as the maximum value calculated from three consecutive measurement cycles. For each cycle the maximum deviation from the command path after the robot started on the second path without delay time and with programmed constant path velocity is measured.9 Minimum Posing TimeThe posing time is the time between departure from and arrival at a stationary state when traversing a predetermined distance and/or sweeping through a predetermined angle under pose-to-pose control. The time taken for a robot to stabilize at the attained pose, as defined in 7.4, is included in the total posing time.10 Static ComplianceStatic compliance is the maximum amount of displacement per unit of applied load. The load should be applied to and the displacement measured at the mechanical interface. The static compliance should be specified in millimeters per newton with reference to the base coordinate system.11 Application Specific Performance CriteriaThe weaving stroke error, in percentage, snail be calculated from the difference between the command weaving stroke Sc and the measured mean attained weaving stroke Sα, see Figure 26, as follows.12 Test ReportThe test report shall consist of a cover sheet(s) and one or more test result sheets. The cover sheet shall provide general information regarding the robot, measurement set-up and the test conditions (physical environment, setup/warm-up, instrumentation, programming method etc.) and the tests conducted. The test result sheets shall provide a summary of the various tests performed with the uncertainty of measurement. ......Source: Above contents are excerpted from the full-copy PDF -- translated/reviewed by: www.ChineseStandard.net / Wayne Zheng et al. Tips & Frequently Asked Questions:Question 1: How long will the true-PDF of English version of GB/T 12642-2013 be delivered?Answer: The full copy PDF of English version of GB/T 12642-2013 can be downloaded in 9 seconds, and it will also be emailed to you in 9 seconds (double mechanisms to ensure the delivery reliably), with PDF-invoice.Question 2: Can I share the purchased PDF of GB/T 12642-2013_English with my colleagues?Answer: Yes. The purchased PDF of GB/T 12642-2013_English will be deemed to be sold to your employer/organization who actually paid for it, including your colleagues and your employer's intranet.Question 3: Does the price include tax/VAT?Answer: Yes. Our tax invoice, downloaded/delivered in 9 seconds, includes all tax/VAT and complies with 100+ countries' tax regulations (tax exempted in 100+ countries) -- See Avoidance of Double Taxation Agreements (DTAs): List of DTAs signed between Singapore and 100+ countriesQuestion 4: Do you accept my currency other than USD?Answer: Yes. www.ChineseStandard.us -- GB/T 12642-2013 -- Click this link and select your country/currency to pay, the exact amount in your currency will be printed on the invoice. Full PDF will also be downloaded/emailed in 9 seconds.Question 5: Should I purchase the latest version GB/T 12642-2013?Answer: Yes. Unless special scenarios such as technical constraints or academic study, you should always prioritize to purchase the latest version GB/T 12642-2013 even if the enforcement date is in future. Complying with the latest version means that, by default, it also complies with all the earlier versions, technically.How to buy and download a true PDF of English version of GB/T 12642-2013?A step-by-step guide to download PDF of GB/T 12642-2013_EnglishStep 1: Visit website https://www.ChineseStandard.net (Pay in USD), or https://www.ChineseStandard.us (Pay in any currencies such as Euro, KRW, JPY, AUD).Step 2: Search keyword "GB/T 12642-2013". Step 3: Click "Add to Cart". If multiple PDFs are required, repeat steps 2 and 3 to add up to 12 PDFs to cart. Step 4: Select payment option (Via payment agents Stripe or PayPal). Step 5: Customize Tax Invoice -- Fill up your email etc. Step 6: Click "Checkout". Step 7: Make payment by credit card, PayPal, Google Pay etc. After the payment is completed and in 9 seconds, you will receive 2 emails attached with the purchased PDFs and PDF-invoice, respectively. Step 8: Optional -- Go to download PDF. Step 9: Optional -- Click Open/Download PDF to download PDFs and invoice. See screenshots for above steps: Steps 1~3 Steps 4~6 Step 7 Step 8 Step 9 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}