GB/T 12549-2013 PDF EnglishUS$760.00 · In stock · Download in 9 seconds
GB/T 12549-2013: Terms and definitions for vehicle controllability and stability Delivery: 9 seconds. True-PDF full-copy in English & invoice will be downloaded + auto-delivered via email. See step-by-step procedure Status: Valid GB/T 12549: Historical versions
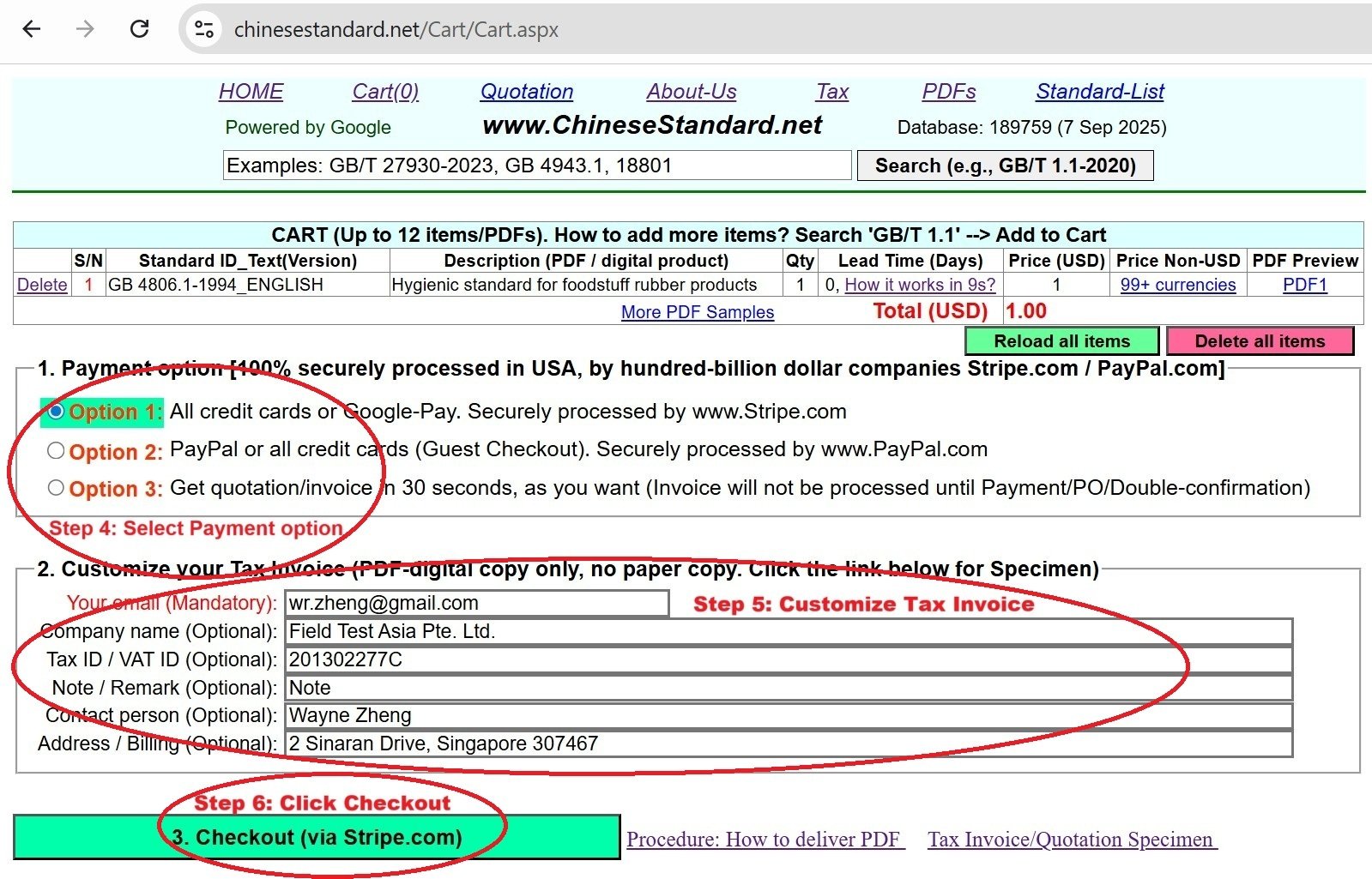
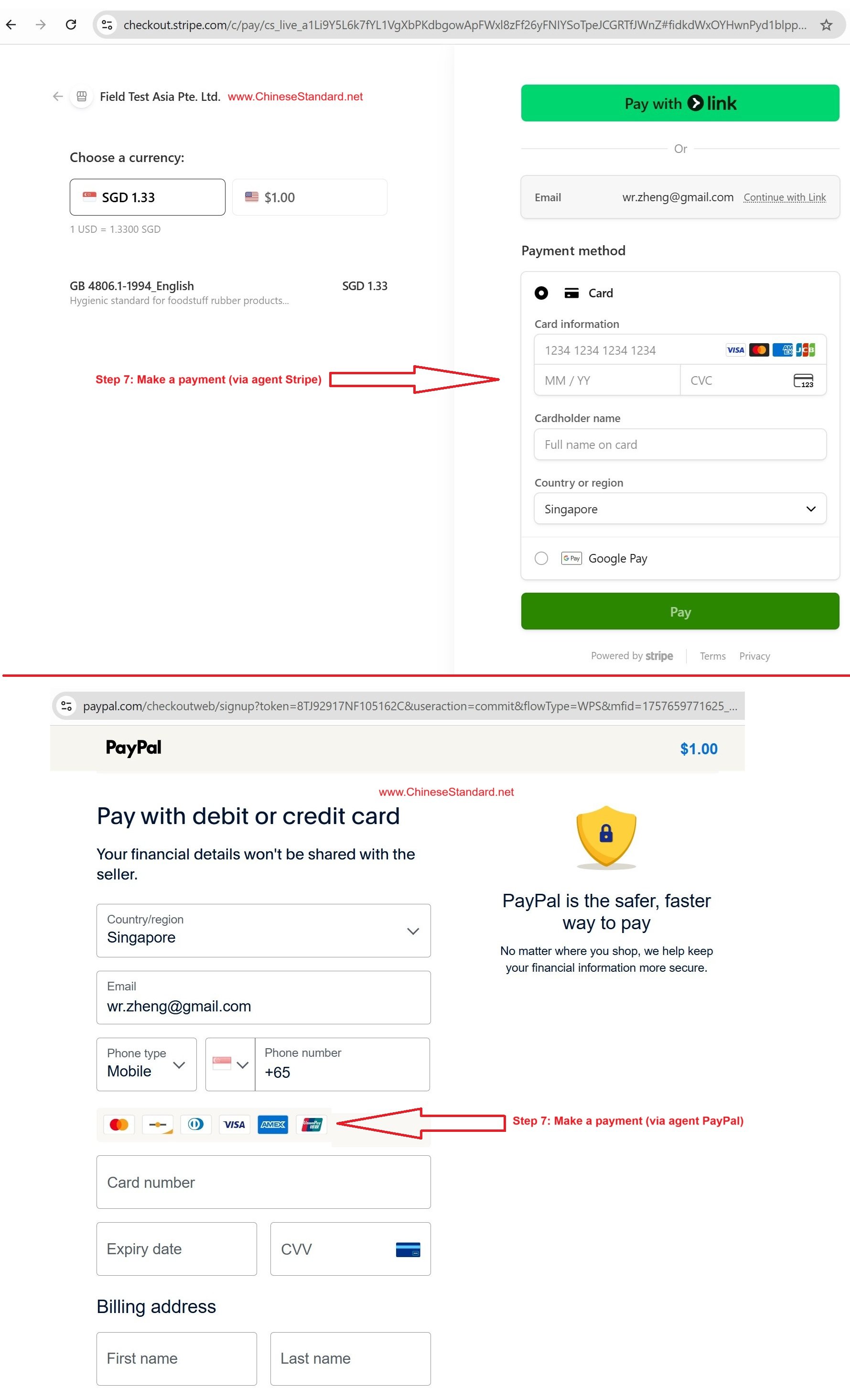
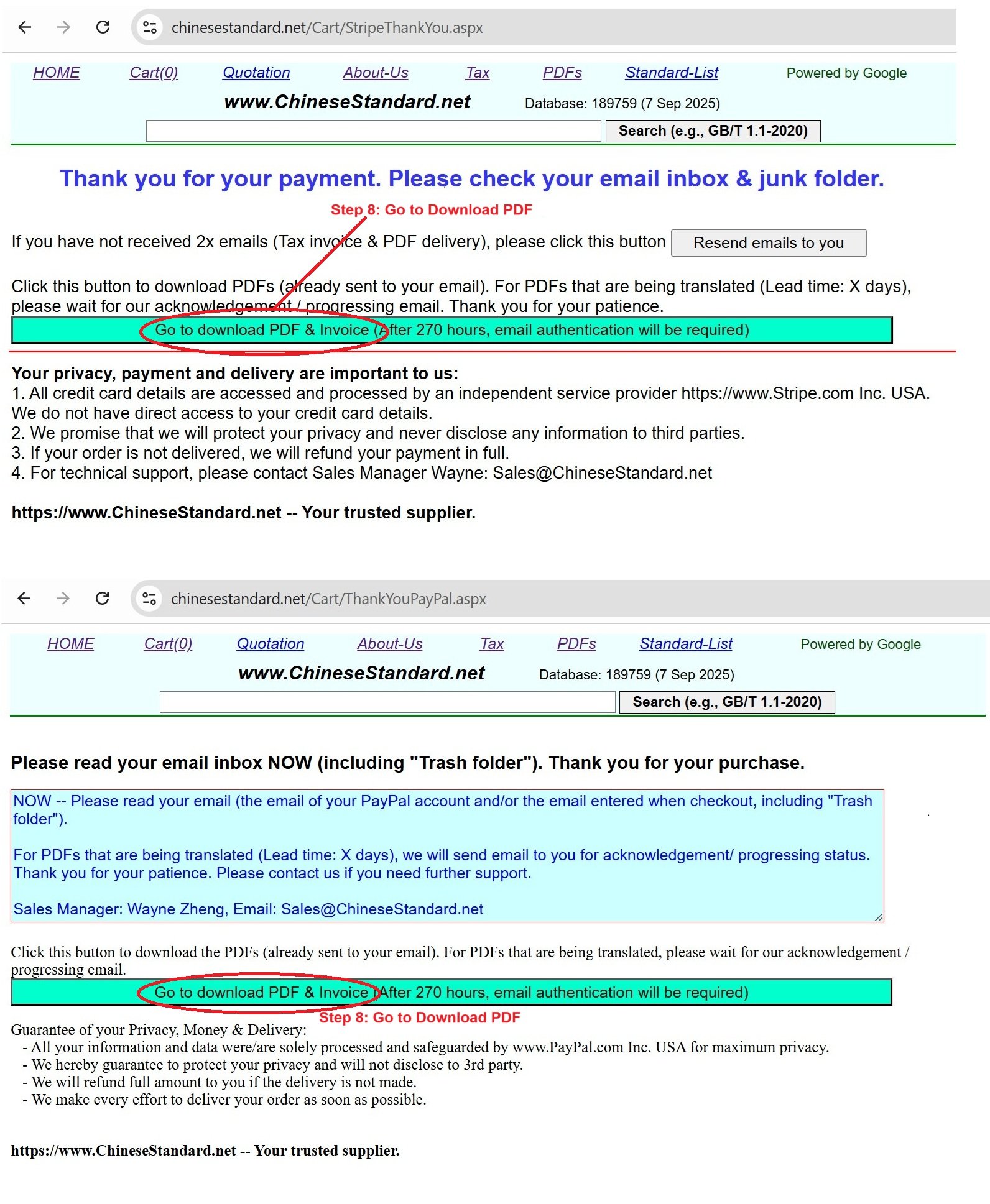
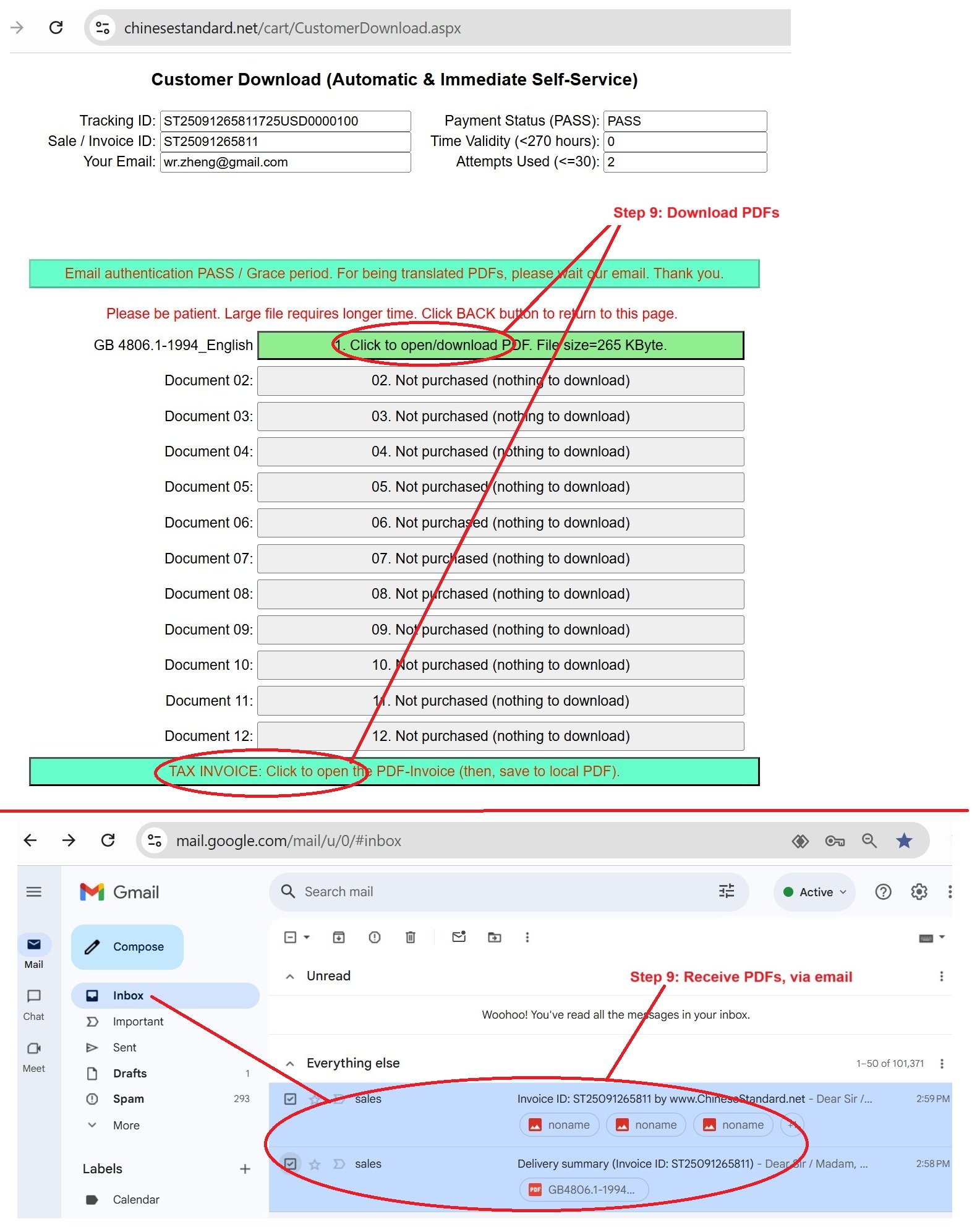
Similar standardsGB/T 12549-2013: Terms and definitions for vehicle controllability and stability---This is an excerpt. Full copy of true-PDF in English version (including equations, symbols, images, flow-chart, tables, and figures etc.), auto-downloaded/delivered in 9 seconds, can be purchased online: https://www.ChineseStandard.net/PDF.aspx/GBT12549-2013NATIONAL STANDARD OF THE PEOPLE’S REPUBLIC OF CHINA ICS 43.040.50 T 23 Replacing GB/T 12549-1990 Terms and definitions for vehicle controllability and stability Issued on. NOVEMBER 27, 2013 Implemented on. JULY 01, 2014 Issued by. General Administration of Quality Supervision, Inspection and Quarantine of PRC; Standardization Administration of PRC. Table of ContentsForeword... 3 1 Scope... 4 2 Normative references... 4 3 Steering system... 4 4 Suspension system... 7 5 Tires and wheels... 13 6 Axis systems and motion... 22 7 Movement characteristics... 32 8 Characteristics of limit maneuver and abnormal motion... 40 9 Test and evaluation... 43 10 Aerodynamics... 51 Index in English... 681 ScopeThis standard specifies the terms and definitions of vehicle controllability and stability. This standard applies to all types of vehicles.2 Normative referencesThe following documents are essential to the application of this document. For the dated documents, only the versions with the dates indicated are applicable to this document; for the undated documents, only the latest version (including all the amendments) is applicable to this standard. GB/T 3730.3-1992 Motor vehicles and towed vehicles - Dimensions of vehicles - Terms and definitions GB/T 6326-2005 Tyre terms and definitions GB/T 16638.1-2008 Aerodynamics - Concepts quantities and symbols - Part 1. Aerodynamic terms in common use3 Steering system3.1 Angles in steering system 3.1.1 Steer angle δs The angle, BETWEEN the vehicle's longitudinal symmetry plane (see 6.1.6) and the center plane of the steering wheel (see 4.1.1) AND the intersection of the pavement (see Figure 1). 3.1.2 Steering wheel angle δsw Steering wheel's angular displacement, which is measured based on the position of the steering wheel, when the vehicle is going straight.4 Suspension system4.1 Suspension geometry 4.1.1 Wheel plane For a single wheel, the wheel plane is the plane, which is equidistant from the inner edge of the wheel rim, on both sides. 4.1.6 Caster angle The angle, between the projection of the centerline of the steering kingpin on the longitudinal plane of symmetry of the vehicle (see 6.1.6) AND the plumb line. If the upper end of the steering kingpin is inclined backward, this angle is positive; if the upper end of the steering kingpin is inclined forward, the angle is negative (see Figure 3). 4.1.10 Kingpin offset The length of the projection of the line, which connects the intersection of the kingpin's extension line and the pavement AND the center of tire contact (see 5.1.1), on the Y'-axis (see 5.1.2). If the center of tire contact is outside the intersection of the kingpin's extension line and the pavement relative to the vehicle body, the kingpin offset is positive; otherwise, it is negative. 4.1.11 Lateral slip The lateral slip value of the straight-running tire, per unit travel distance, which is measured on the lateral slip test bench. It is expressed in m/km, mm/m. 4.1.12 Wheelbase The distance, between two planes that pass through point A or (B) of two adjacent wheels on the same side of the vehicle AND are perpendicular to the Y and X planes, respectively. 4.2 Suspension system mechanics 4.2.1 Suspension vertical stiffness Under a certain load state, the change in the vertical load of the wheel, which is corresponding to the unit displacement of the sprung center of mass, as relative to the center of the wheel, in the vertical direction. 4.2.2 Suspension longitudinal stiffness The change in longitudinal force at the wheel center, which is corresponding to a unit displacement of the wheel center, as relative to the sprung center of mass, in the longitudinal [x-axis (see 6.1.3) direction]. 4.2.10 Roll axis A line, which connects the front and rear roll centers. 4.2.11 Suspension compliance Reciprocal of suspension stiffness. 4.2.12 Damping force characteristic The relationship between the damping force of a shock absorber and its piston speed. 4.2.13 Overturning couple Moment of the force acting on the vehicle, relative to the longitudinal axis of the vehicle on the pavement, due to the effects of lateral acceleration (see 6.4.16) and roll angular acceleration.5 Tires and wheels5.1 Tire axis system and variables 5.1.1 Center of tire contact The intersection, BETWEEN the intersection line of wheel plane and the ground AND the projection of the wheel rotation center line on the ground (see Figure 1, Figure 4). 5.1.2 Tire axis system (X', Y', Z') A right-handed rectangular axis system, which uses the center of tire contact as the origin. The X' axis is the intersection of the wheel plane and the road plane, wherein the travel direction of the wheel plane is positive 5.1.3 Slip angle of tire The angle, between the traveling direction of the center of tire contact and the X' axis of the tire axis system (see Figure 4 and Figure 5). 5.4.6 Cornering stiffness The increment of lateral force, which is corresponding to a unit increment of tire slip angle (usually refers to the measured value, when the tire slip angle is zero). 5.4.9 Aligning stiffness (aligning torque stiffness) The increment of the aligning torque, which is corresponding to the unit increment of the tire slip angle (usually refers to the measured value, when the tire slip angle is zero). 5.4.10 Cornering stiffness coefficient The ratio of cornering stiffness to vertical load, for a free-rolling wheel. 5.4.11 Camber stiffness coefficient The ratio of camber stiffness to vertical load, for a free-rolling wheel. 5.5.5 Slipping braking adhesion coefficient At a given trim, the braking force coefficient, when the wheels are locked.6 Axis systems and motion6.1 Axis system 6.1.1 Earth-fixed axis system (X, Y, Z) A right-handed Cartesian axis system, which is fixed to the ground. The origin is a point on the ground; the X and Y axes lie in the horizontal plane; the Z axis points upward. The trajectory of the vehicle's motion is described by this axis system (see Figure 6). 6.1.7 Roll Rotation of the vehicle's sprung mass (see 6.2.2) about the x0 axis. 6.1.8 Pitch Rotation of the vehicle's sprung mass (see 6.2.2) about the y0 axis. 6.1.9 Yaw Rotation of the vehicle's sprung mass (see 6.2.2) about the z0 axis. 6.1.10 Pitch axis Axis, which passes through the fixed point of pitch vibration AND is parallel to the Y axis. 6.2 Mass and center of mass 6.2.1 Mass of vehicle The mass of the vehicle, under any load state. 6.2.2 Sprung mass The mass of the load above the elastic element of the suspension, that is, the mass of the part of the load, which is carried by the suspension. 6.4 Kinematic variables 6.4.1 Velocity vector at center of mass The 3D velocity vector of the vehicle's center of mass (or sprung center of mass). 6.4.2 Vehicle speed The horizontal component of the velocity vector of the vehicle's center of mass (or sprung center of mass) (see Figure 6). 6.4.3 Longitudinal velocity The component of the velocity vector of vehicle's center of mass (or sprung center of mass), along the x-axis (see Figure 6). 6.6.2 Pitching moment The component of the moment vector, which acts on the vehicle, to rotate the vehicle around the y-axis. 6.6.3 Yawing moment The component of the moment vector, which acts on the vehicle, to rotate the vehicle around the z-axis.7 Movement characteristics7.1 Control modes 7.1.1 Position control Vehicle control, when displacement inputs (or limits) are applied to certain control points, in the steering system (steering wheels, steering arm, handwheel), independent of the required force. 7.2 Response 7.2.1 Steering response The motion of the vehicle, which is caused by inputs, which are applied to operating (steering) components. It includes the steering response, which is caused by the driver's input on the brake and accelerator pedals. 7.2.2 Disturbance response The motion of the vehicle, which is caused by the external disturbance (force or displacement), acting on the vehicle. Example. Vehicle movement, which is caused by wind, uneven pavement. 7.3 Steering characteristics 7.3.1 Neutral steer When the vehicle speed is constant AND the lateral acceleration is changed, if the slope of the nominal steering angle (see 3.1.4) is equal to the slope of the Ackermann angle (see 3.1.6), the steering characteristic of the vehicle is neutral steer. This characteristic is roughly equivalent to a zero value for the static margin (see 7.3.6). It is shortly referred to as NS (see Figure 8). 7.4.5 Asymptotic stability For the specified trim, when there is any small and brief change in disturbance or control input, the vehicle will approach the motion state, which is specified by the trim. 7.4.6 Neutral stability For the specified operating point, the vehicle will remain in a state of motion close to but not reaching the specified trim, when disturbances or brief changes in control input occur. 7.4.7 Driver viewing distance During driving, the horizontal distance from the driver's eyes to the fixation point. 7.4.8 Quantification of on-center handling A description of steering feel and precision, when a vehicle is traveling at high speed and with small lateral acceleration, in an approximately straight line and through large diameter curves.8 Characteristics of limit maneuver and abnormal motion8.1 Characteristics of limit maneuver 8.1.1 Maximum centripetal acceleration The maximum value of the centripetal acceleration, which is achieved by the vehicle in a curved motion, under manual control or fixed control conditions. 8.1.6 Overturning limit angle The acute angle, between the roll test bench and the horizontal plane, in the state of the kerb weight of the whole vehicle, when using the roll test bench to tilt the vehicle to the left (or right), until all the wheels on the unloaded side leave the roll bench or the wheels start to slip, 8.2 Abnormal motion 8.2.1 Break away The lateral slip of the vehicle, when the resultant force on the tread surface of the tire contact is greater than the adhesion force. Rear wheel sideslip is called 'tail flick' (a sharp increase in yaw velocity and rear wheel's slip angle); front wheel slip is called 'float' (increase in turning radius and decrease in yaw velocity). 8.2.2 Tuck in In the slewing motion, the phenomenon that the vehicle turns inward, when the accelerator pedal is suddenly retracted OR the clutch is rapidly disengaged. 8.2.3 Wheel lift Under the action of centrifugal force, the front wheel or rear wheel inside the vehicle steering leaves the pavement.9 Test and evaluation9.1 Normal tests 9.1.1 Steady static circular test It is a test to evaluate the understeer and oversteer characteristics, roll characteristics, maximum lateral acceleration, steering wheel torque, etc., of the vehicles, by changing the lateral acceleration and allowing the vehicle to run, at a certain speed, along an arc which has a fixed radius. 9.1.2 Minimum turning diameter test The test, which is used to measure the diameter of the trajectory circle, which is formed by the movement of the vehicle, by keeping the steering wheel angle at the maximum position AND allowing the vehicle to drive at a very low speed. 9.1.3 Test of effect of sudden power change A test, which is used to evaluate the stability of the vehicle, when the vehicle is suddenly accelerated or decelerated, during cornering, by controlling the acceleration pedal. 9.1.9 Test of braking stability It is a test, to evaluate whether the vehicle deviates, sideslips and loses steering ability, when braking while driving. Note. Use lateral displacement, yaw angle, etc. for evaluation. 9.1.10 Kick-back test A test, which is used to evaluate the steering wheel torque and steering wheel kick- back, when the vehicle is running on bad roads or uneven pavements. 9.1.11 Response test of tire burst A test to evaluate how easy it is for the driver to control the vehicle, after the tire bursts while driving. 9.3 Evaluation 9.3.1 Relative steering wheel displacement The steering wheel's angle increment, when the vehicle turns at a very low speed AND the turning radius of the center of mass is 10 m. 9.3.2 Coefficient of centripetal acceleration effect The ratio -- of the steering wheel's angle increment TO the centripetal acceleration increment, when the vehicle turns at a fixed turning radius. 9.3.3 Coefficient of centripetal acceleration on steering force The ratio -- of the steering force increment to the centripetal acceleration increment, -- when the vehicle turns at a fixed turning radius. 9.3.15 Degree of understeer The average slope, at the lateral acceleration value of 2 m/s2 (the ordinate value divided by the abscissa value), on the relationship curve, BETWEEN the side slip angle difference between the front and rear axles AND the lateral acceleration. 9.3.16 Roll rate of body The average slope, at the lateral acceleration value of 2 m/s2 (the ordinate value divided by the abscissa value), on the curve of the relationship, between the vehicle roll angle and the lateral acceleration. ......Source: Above contents are excerpted from the full-copy PDF -- translated/reviewed by: www.ChineseStandard.net / Wayne Zheng et al. Tips & Frequently Asked Questions:Question 1: How long will the true-PDF of English version of GB/T 12549-2013 be delivered?Answer: The full copy PDF of English version of GB/T 12549-2013 can be downloaded in 9 seconds, and it will also be emailed to you in 9 seconds (double mechanisms to ensure the delivery reliably), with PDF-invoice.Question 2: Can I share the purchased PDF of GB/T 12549-2013_English with my colleagues?Answer: Yes. The purchased PDF of GB/T 12549-2013_English will be deemed to be sold to your employer/organization who actually paid for it, including your colleagues and your employer's intranet.Question 3: Does the price include tax/VAT?Answer: Yes. Our tax invoice, downloaded/delivered in 9 seconds, includes all tax/VAT and complies with 100+ countries' tax regulations (tax exempted in 100+ countries) -- See Avoidance of Double Taxation Agreements (DTAs): List of DTAs signed between Singapore and 100+ countriesQuestion 4: Do you accept my currency other than USD?Answer: Yes. www.ChineseStandard.us -- GB/T 12549-2013 -- Click this link and select your country/currency to pay, the exact amount in your currency will be printed on the invoice. Full PDF will also be downloaded/emailed in 9 seconds.Question 5: Should I purchase the latest version GB/T 12549-2013?Answer: Yes. Unless special scenarios such as technical constraints or academic study, you should always prioritize to purchase the latest version GB/T 12549-2013 even if the enforcement date is in future. Complying with the latest version means that, by default, it also complies with all the earlier versions, technically.How to buy and download a true PDF of English version of GB/T 12549-2013?A step-by-step guide to download PDF of GB/T 12549-2013_EnglishStep 1: Visit website https://www.ChineseStandard.net (Pay in USD), or https://www.ChineseStandard.us (Pay in any currencies such as Euro, KRW, JPY, AUD).Step 2: Search keyword "GB/T 12549-2013". Step 3: Click "Add to Cart". If multiple PDFs are required, repeat steps 2 and 3 to add up to 12 PDFs to cart. Step 4: Select payment option (Via payment agents Stripe or PayPal). Step 5: Customize Tax Invoice -- Fill up your email etc. Step 6: Click "Checkout". Step 7: Make payment by credit card, PayPal, Google Pay etc. After the payment is completed and in 9 seconds, you will receive 2 emails attached with the purchased PDFs and PDF-invoice, respectively. Step 8: Optional -- Go to download PDF. Step 9: Optional -- Click Open/Download PDF to download PDFs and invoice. See screenshots for above steps: Steps 1~3 Steps 4~6 Step 7 Step 8 Step 9 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}