GB 10827.1-2014 PDF EnglishUS$145.00 · In stock · Download in 9 seconds
GB 10827.1-2014: [GB/T 10827.1-2014] Industrial trucks -- Safety requirements and verification -- Part 1: Self-propelled industrial trucks, other than driverless trucks, variable-reach trucks and burden-carrier trucks Delivery: 9 seconds. True-PDF full-copy in English & invoice will be downloaded + auto-delivered via email. See step-by-step procedure Status: Valid GB 10827.1: Historical versions
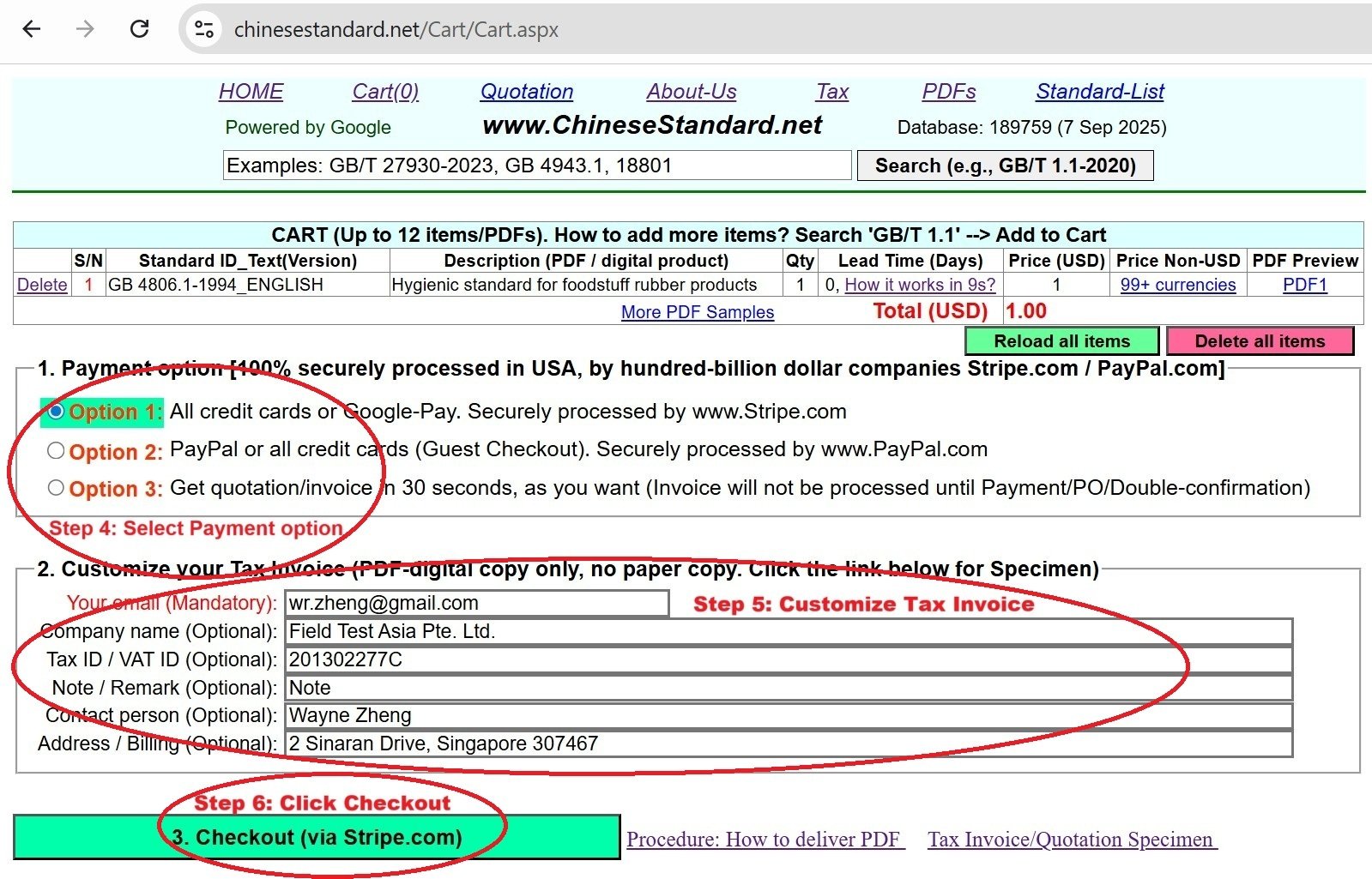
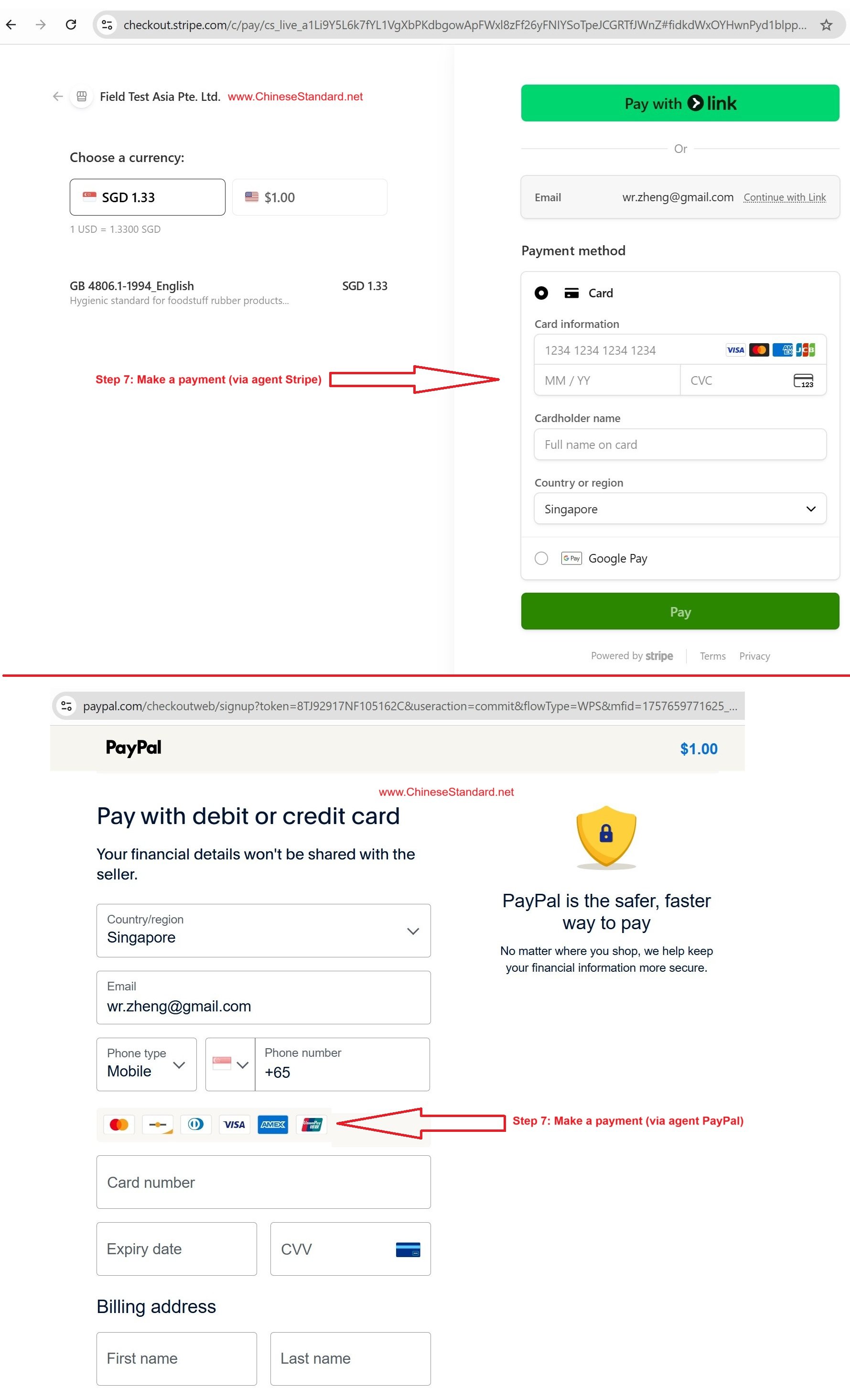
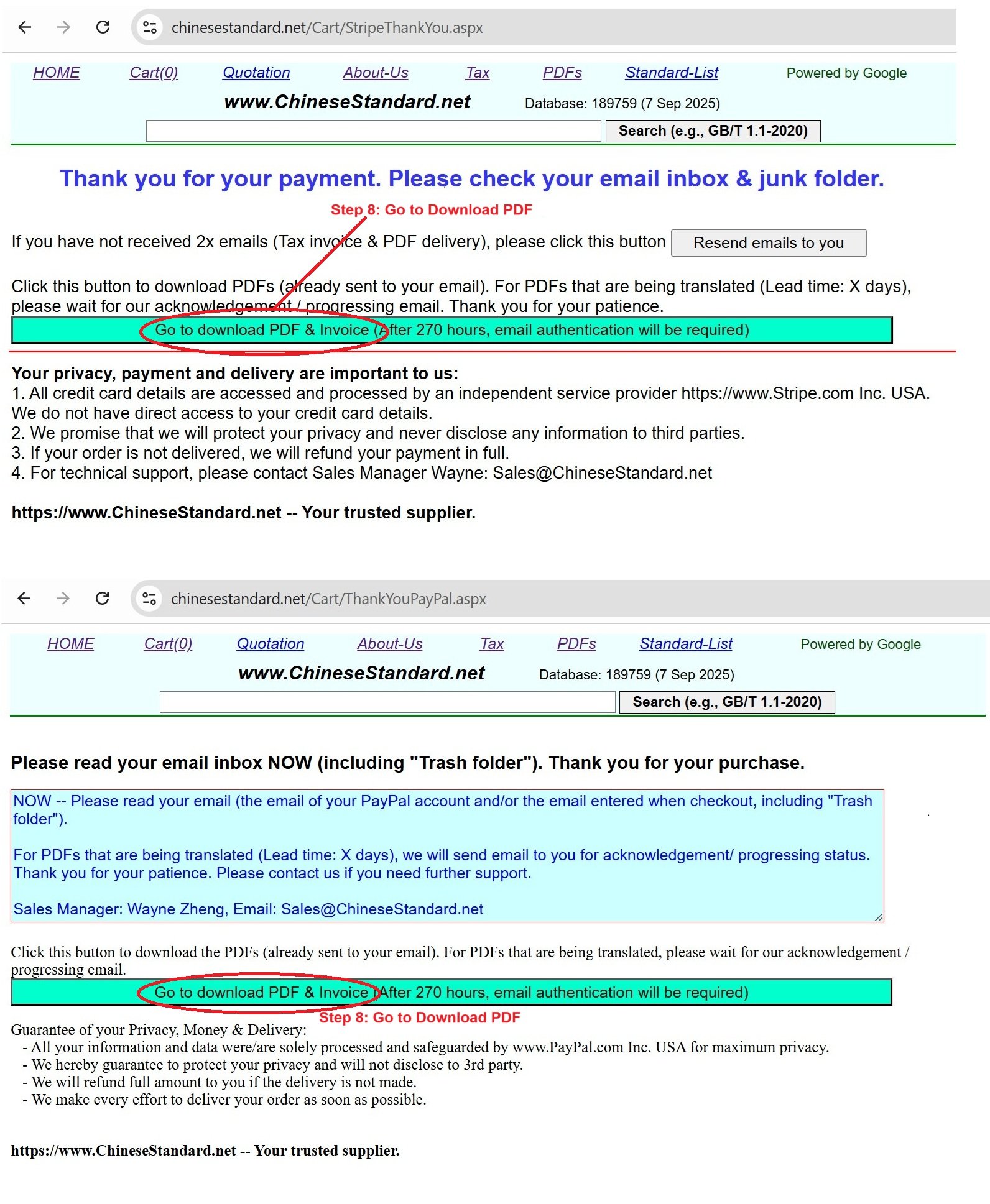
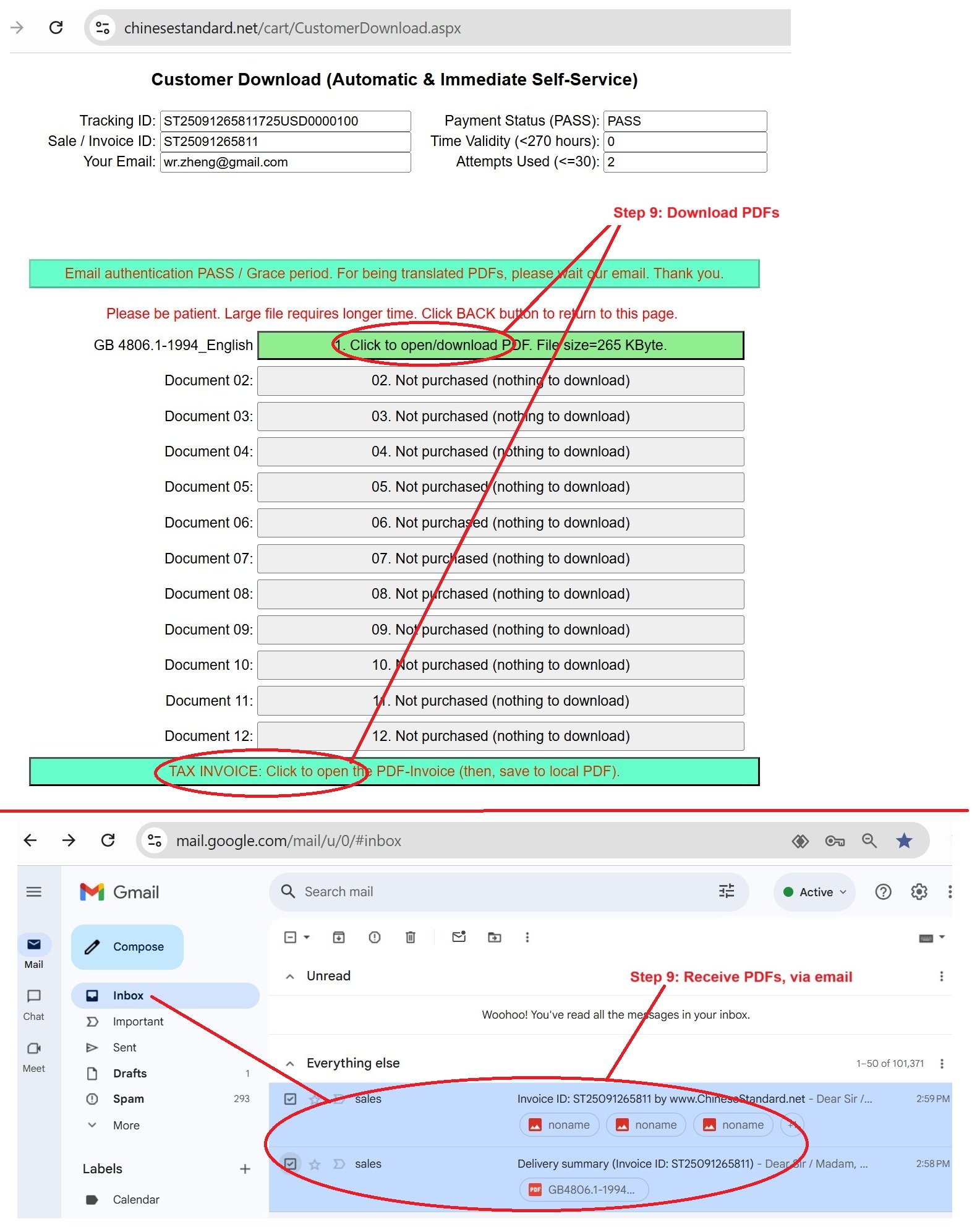
Similar standardsGB 10827.1-2014: [GB/T 10827.1-2014] Industrial trucks -- Safety requirements and verification -- Part 1: Self-propelled industrial trucks, other than driverless trucks, variable-reach trucks and burden-carrier trucks---This is an excerpt. Full copy of true-PDF in English version (including equations, symbols, images, flow-chart, tables, and figures etc.), auto-downloaded/delivered in 9 seconds, can be purchased online: https://www.ChineseStandard.net/PDF.aspx/GB10827.1-2014 Industrial trucks.Safety requirements and verification.Part 1.Self-propelled industrial trucks, other than driverless trucks, variable-reach trucks and burden-carrier trucks ICS 53.060 J83 National Standards of People's Republic of China Replacing GB 10827-1999 Industrial vehicles - Safety requirements and verification Part 1.Self-propelled industrial vehicles (except no Driving vehicles, telescopic boom truck and trailer) Part 1.Self-propeledindustrialtrucks, otherthandriverlesstrucks, (ISO 3691-1.2011, IDT) Issued on. 2014-12-01 2014-07-24 implementation Administration of Quality Supervision, Inspection and Quarantine of People's Republic of China Standardization Administration of China released Table of ContentsIntroduction Ⅲ Introduction Ⅴ 1 Scope 1 2 Normative references 2 3 Terms and definitions 3 4 Safety requirements and/or protective measures 5 5 Safety requirements and/or protective measures to verify 25 6 26 use of information Appendix A (normative) running direction and determine the weight of 31 rated Annex B (informative) lists 34 major hazard References 38ForewordChapter 4 of this section (except 4.1.4,4.2.2.4,4.2.2.5,4.6.3.5,4.11.4), Chapter 5, 6.3 are mandatory, others are recommended Provisions. GB 10827 "industrial vehicle safety requirements and verification" is divided into eight sections. --- Part 1.Self-propelled industrial vehicles (except unmanned vehicles, telescopic boom truck and trailer); --- Part 2.Self-propelled telescopic forklift; --- Part 3.Lifting the vehicle with the console and is specifically designed to lift loads with additional requirements from the vehicle running; --- Part 4.Driverless industrial vehicles and systems; --- Part 5.walk-in vehicle; --- Part 6.cargo and personnel carrier vehicles; --- Part 7.Regional requirements for European Union countries; --- Part 8.Regional requirements for non-EC countries. This section GB Part of 110,827. This section drafted in accordance with GB/T 1.1-2009 given rules. This Part replaces GB 10827-1999 "industrial motor vehicle safety standard" compared with GB 10827-1999 major technological changes as follows. --- The "first chapter powered industrial vehicle manufacturer shall comply with safety regulations, including the operation, control, safety requirements and other institutions" Adjust To Chapter 4, "Safety requirements and/or protective measures" (see Chapter 4 of the 1999 edition of the first chapter); --- The "second in powered industrial trucks in use, operation and maintenance of the safety norms in part" to adjust to "Chapter 6 make Information "(see Chapters 6 and 1999 The second edition); --- Added "verify the safety requirements and/or protective measures" (see Chapter 5). This section uses the translation method identical with ISO 3691-1.2011 "industrial trucks - Safety requirements and verification - Part 1.Self-propelled work Vehicle industry (except unmanned vehicles, telescopic boom truck and trailer). " This section incorporates ISO 3691-1.2011/Cor.1.2013 the content, the terms of these amendments has been involved through its external Vertical wire (‖) side margin positions were marked. Consistency correspondence between this part of international documents and normative references of our files are as follows. --- GB/T 5182 forks technical requirements and test methods (GB/T 5182-2008, ISO 2330.2002, IDT) --- GB/T 6104 motor vehicle industry terminology (GB/T 6104-2005, ISO 5053.1987, IDT) --- GB/T 20953 and determination of agricultural and forestry tractors (GB/T 20953-2007 mechanical cab interior material combustion characteristics, ISO 3795.1989, MOD) This part made the following editorial changes. --- Will delete all references to the original text of ISO /T S3691-7 on EU regional requirements; --- The original referenced ISO /T S3691-8 requirements for non-EU regions in direct write, and which for North America, Australia Remove all the regional requirements of Australian, Japan, South Africa and the region; --- Increased references, including reference to the original text, but does not refer to a file that appears or appear in the "note" in its normative His standards. This part is proposed by China Machinery Industry Federation. This part of the National Standardization Technical Committee Vehicle (SAC/TC332) centralized. This section is responsible for drafting unit. Anhui Heli Co., Ltd., Beijing Materials Handling Design and Research Institute, the National lifting the transport machinery Quality Supervision and Inspection Center. Participated in the drafting of this section. Linde (China) Forklift Co., Ltd., Guangxi Liugong Machinery Co., Ltd., Ningbo Ruyi Co. Shares The company, Hangzhou Forklift Group Co., Ltd., Dalian Forklift Co., Ltd., Zhejiang Connaught Machinery Co., Ltd., Xiamen, Xiamen Engineering Machinery Stock Ltd., Fujian Special Equipment Inspection and Research Institute, Anhui Jianghuai heavy construction machinery UnionPay Co., Ltd. The main drafters of this section. Wang Ying, Zhao Chunhui, pottery Jiahong, Wang Xiaofeng, Xu Chao, Wu Yin-Tang, Fengzhen Li, Zhang Zhongze, Gu Qun, Zhou Xuejun, Jiang Lei, Zhang Yuanrong, Wang back. This part of the standard replaces the previous editions are. --- GB 10827-1989, GB 10827-1999.introductionThis section GB 10827 "scope" in clear and dangerous machinery involved could lead to a dangerous state or dangerous events. GB 10827 series of standards includes the safety requirements and verification as defined in ISO 5053 for industrial vehicles. Products should be designed when used in manufacturer foreseeable conditions, to meet its purpose or function, and is capable of adjustment and maintenance When not pose a risk to personnel. In order to rationally design and make the product meet all the specific safety requirements, the manufacturer should confirm the danger associated with their products and Risk assessment. Then the manufacturer should be considered in the assessment of its product design and manufacturing. Objective risk assessment is to eliminate the risk of mechanical occur in their foreseeable lifetime of the accident, including due to Foreseeable abnormal state caused by installation and removal phases the risk of accidents. Manufacturers should be the following principles and order to select the most appropriate method. a) to eliminate or reduce the risk by design (inherently safe design and manufacture of machinery) as far as possible; b) to take the necessary protective measures can not be eliminated by the design of risk; Protective measures defects c) inform the user taken; d) whether the need for specialized training; e) provision of personal protective equipment to be provided; f) providing the correct operating instructions by the appropriate user documentation. Industrial vehicles should be designed to prevent any foreseeable misuse may induce risk. In addition, there should not be based on empirically known The use of mechanical methods, should alert the user in the instructions for use. This section will not be repeated for the vehicle manufacturing industry technical requirements of all processes and materials. For details, see GB/T 15706. Industrial vehicles - Safety requirements and verification Part 1.Self-propelled industrial vehicles (except no Driving vehicles, telescopic boom truck and trailer) 1 Scope GB This section 10827 specifies the safety as defined in ISO 5053 following self-propelled industrial vehicles (hereinafter referred to as "vehicle") to Seek and authentication methods. a) forklift trucks; b) reach truck (with a retractable mast or fork frame); c) straddle trucks; d) pallet stacker; e) high lift platform truck; f) console lifting height of not more than 1200mm of the vehicle; g) truck side (unilateral); h) side stacker truck (sides and three-way); i) pallet truck; j) two-way and multi-directional forklift operation; k) is not greater than 20000N traction tractor; l) counterbalanced terrain forklifts; m) to other batteries, diesel, petrol or LPG powered industrial vehicles. Note 1.This section does not apply to compressed natural gas-powered vehicles to compressed natural gas and other power sources powered vehicles may be revised in the future headquarters Sharing increases. For console lifting height greater than 1200mm vehicles and/or with a raised load from the vehicle to run more than 1200mm, this Section should be used in conjunction with ISO 3691-3. NOTE 2.ISO 3691-3 does not apply to vehicles forklift trucks or container handling. Note 3.Some plays with low lifting height of not more than 1200mm lift pickers console, you can install an additional lifting device will play a load raised 1800mm maximum lifting height, apply. This section does not apply to self-propelled telescopic boom forklift, unmanned vehicles and trailer, ISO 3691-2, ISO 3691-4 and ISO 3691-6 are applicable to these vehicles. This section does not apply in harsh conditions (such as extreme weather, cold storage applications, hazardous environments) vehicle operation, which requires special circumstances Special protective measures. This section relates to the addition of the following situations, the use of the machinery and foreseeable conditions under manufacturer's intended use of misuse as described in Appendix B All major hazards, dangerous state or hazardous events listed. This section does not include the following dangerous situations may occur. --- In the manufacturing process; --- Moving freely swinging suspension load time; --- Use on the road; --- Operation in potentially explosive atmospheres when; --- When used on one side and the gap between the shelves less than 500mm narrow passage; --- Driving tow load when driving seat vehicle, the use of non-ergonomic posture caused; --- When driving nominal weight greater than 10000kg idling vehicles, since the relationship between field of vision caused; --- Overloaded. Note 4.This section, fork, loading platform and integral attachments are seen as part of an industrial vehicle. Removably mounted on the load platform or fork Type attachment, it is not considered part of an industrial vehicle. The requirements for the attachment of this part of the relevant provisions. 2 Normative references The following documents for the application of this document is essential. For dated references, only the dated version suitable for use herein Member. For undated references, the latest edition (including any amendments) applies to this document. Top Shelf technical requirements and test methods GB/T 5143-2008 industrial vehicle protection (ISO 6055.2004, IDT) GB/T 5169.16-2008 Fire hazard testing for electric and electronic products - Part 16.Test flames - 50W horizontal and vertical fire Flame test methods (IEC 60695-11-10.2003, IDT) GB/T 5184-2008 trucks - Hook - on type fork and fork frame dimensions (ISO 2328.2007, IDT) Devices and other display devices GB/T 7593-2008 powered industrial vehicle operator control symbols (ISO 3287.1999, IDT) GB/T 8420-2011 moving machinery physical dimensions of operators and minimum operator space (ISO 3411.2007, IDT) GB 10827.5-2013 industrial vehicles - Safety requirements and verification - Part 5.Walk-in vehicles (ISO 3691-5.1999, IDT) GB/T 15706-2012 Safety of machinery - General principles for design risk assessment and risk decreases (ISO 12100.2010, IDT) GB 16754-2008 Safety of machinery - Emergency stop design principles (ISO 13850.2006, IDT) GB/T 16855.1-2008 Safety of machinery - Safety-related control system components - Part 1.General principles for design (ISO 13849-1-2006, IDT) GB/T 17300-2010 moving machinery passage means (ISO 2867.2006, IDT) GB/T 18849-2011 Powered industrial trucks - Brake performance and component strength (ISO 6292.2008, IDT) GB/T 22417-2008 trucks cross on goods and telescopic fork technical performance and strength requirements (ISO 13284.2003, IDT) GB/T 22418-2008 Industrial Vehicles Additional requirements for automated functions (ISO 24134.2006, IDT) GB/T 22419-2008 industrial vehicles container handling and grappler arm operations indicator technical requirements GB/T 26560-2011 Powered industrial trucks - Safety signs and hazard pictorials General (ISO 15870.2000, IDT) GB/T 26562-2011 industrial self-propelled vehicle driving seat pedal arrangement structure and principles of the structure and layout of pedals GB/T 26948.1-2011 Industrial vehicle driver restraint system technical requirements and test methods - Part 1.waist belts GB/T 26949.1-2012 Industrial Vehicle Stability verification - Part 1.General GB/T 26949.2-2013 Industrial Vehicle Stability verification - Part 2.forklift trucks GB/T 26949.3-2013 Industrial Vehicle Stability verification - Part 3.Reach and straddle trucks GB/T 26949.10-2011 industrial vehicle stability verification Part 10.Under the power plant stacks lateral loading conditions - Additional stability test GB/T 27544-2011 industrial vehicle electrical requirements (ISO 20898.2008, IDT) ISO 2330 forks technical requirements and test methods - industrial vehicle safety requirements and verification - Part 3.Lifting the vehicle with a specially designed console and As with lifting load operation of the vehicle Additional requirements 1) forthcoming. ISO 3795.1989 for agriculture and forestry road vehicles, tractors and machinery internal combustion behavior of materials measured ISO 5053 Powered industrial trucks term ISO 13564-1.2012 Test methods for powered industrial trucks verify Perspective Part 1.The nominal weight of not more than 10t Sit and stand-rider vehicle ISO 22915-4.2009 Industrial verify the stability of the vehicle - Part 4.Pallet stackers, double stackers and console from increased Is not greater than the chosen vehicle 1200mm ISO 22915-7.2009 Industrial Vehicle Stability verification - Part 7.Bidirectional and multidirectional trucks ISO 22915-8.2008 Industrial Vehicle Stability verification - Part 8.In the mast forward stacking and loading conditions enhance job ISO 22915-20.2008 Industrial Vehicle Stability verification - Part 20.Additional stability test under load bias conditions jobs Test 2009 Industrial verify the stability of the vehicle - Part 21.. ISO 22915-21 console lifting height greater than 1200mm picking Vehicles 3 Terms and Definitions ISO 5053 and GB/T 15706 and defined by the following terms and definitions apply to this document. 3.1 Self-propelled industrial vehicles self-propeledindustrialtruck At least three wheels and wheeled vehicles with a power drive device (not including those in the vehicle running on the track), designed to move Transportation, traction, Pushing, lifting, stacking or layering on the shelf stacking a variety of goods, by one operator (3.7) control. Note. The full terms see ISO 5053. 3.2 Step rider vehicle pedestrian-controledtruck Followed by a walk to a vehicle operator (3.7) remote control device such as a tiller or control vehicles. NOTE. This vehicle can be equipped with stand-on option. 3.3 Ride type vehicle ride-ontruck A seated or standing on the platform operator (3.7) control of the vehicle. NOTE. Stand-industrial vehicle operator's seat with the vehicle belonging rider. 3.4 Low lift vehicle low-lifttruck Lifting height of not more than 500mm of the vehicle. 3.5 Two-way operation of the vehicle bidirectionaltruck Along with their vehicle parallel or perpendicular to the longitudinal axis of the run. Note. According to ISO 5053.1987 in 3.6.1.2 adaptation. 3.6 Multi multidirectionaltruck to operation of the vehicle In either direction relative to its longitudinal axis running vehicle. Note. According to ISO 5053.1987 in 3.6.1.3 adaptation. 3.7 Operator operator Appropriately trained and qualified, responsible for controlling the operation of the industrial vehicle and load handling professionals. Note 1.Depending on the type of the vehicle, the operator can ride, step driving (eg tiller control, control cable) or remote (such as radio-controlled) vehicles. Note 2.The national regulations may apply. 3.8 Normal operating position normaloperatingposition The operator can control all functions of operation and load handling position according to the manufacturer's instructions. NOTE. If you can not control all the functions of the vehicle in a position, then the manufacturer may specify additional locations. Rotating seat with more than one operating direction Chair or stand-end control of the vehicle can also be seen as having an operating position. 3.9 Lifting height liftheight The upper surface of the horizontal section or fork lift platform to the vertical distance between the ground. 3.10 Lifting height liftheightfortraveling runtime Running to provide sufficient ground clearance and promotion is not greater than the height of 500mm. Note. The runtime lifting height equivalent to the maximum lifting height stability test run. 3.11 Low lifting height lowliftheight The maximum lifting height of not more than 500mm, this time, the vertical distance between the centroid of the load and the ground does not exceed 1100mm. 3.12 Automatic operation of the braking device automaticalyactingbrakes Under non-operating conditions, in addition to the operator to release automatically implement mechanical braking device. 3.13 Loss of load center distance lostloadcentre The removable attachment is mounted to the horizontal displacement of the vehicle when standard load center may arise. NOTE. The standard load center distance given in Appendix A. 3.14 The actual starting weight actualcapacity By the manufacturer according to the strength and stability of the vehicle to determine the parts of the vehicle in the normal operating state, a specific load center distance (if necessary To also reach) can when handling, lifting and stacking height to a specific maximum load (in kilograms). Note. The actual starting weight depends on the configuration of the vehicle, it is the type of installation and the mast lifting height, load center distance and the actual installation of the genus have closed. The actual starting weight specifies the load carrying capacity of a particular configuration of the vehicle. Through appropriate correction calculation stability test or empirical data Test, the vehicle can be determined with the magnitude of the actual lifting the detachable attachment when. 3.15 Rated weight ratedcapacity Determined by the manufacturer of the components according to the strength and stability of the vehicle, the vehicle is capable of standard load centroid handling, lifting and stacking Standard lifting height to the maximum load (in kilograms). Note 1.The centroid in Appendix A. Note 2.When the mast lifting height lower than the standard lifting height H, still in accordance with standard lifting height determining the rated capacity. Note 3.The nominal weight is used to compare different manufacturers produced vehicle rated capacity, and provide the basis for technical standards and statistics. The operating limits of the vehicle From the weight of the actual decision. 4 Safety requirements and/or protective measures 4.1 Overview 4.1.1 General requirements Vehicles shall comply with the safety requirements and/or protective measures of this chapter. In addition, for non-significant risk not covered in this section, the principle should be GB/T 15706 stipulated the vehicle design. 4.1.2 normal weather conditions Job vehicles should meet the following normal weather conditions. --- Average ambient temperature under continuous operation conditions. 25 ℃; --- Short term (less than 1h) maximum ambient temperature. 40 ℃; --- Under normal indoor conditions Minimum ambient temperature during use of the vehicle. 5 ℃; --- Under normal outdoor conditions Minimum ambient temperature during use of the vehicle. -20 ℃; --- Altitude. less than 2000m. 4.1.3 normal operating conditions Normal operating conditions as follows. --- On a solid, flat, level and paved roads (including running and lifting), road conditions, vehicle design jobs should be Instructions are described in detail (see 6.2); --- Load when traveling within the centroid should be located approximately at the longitudinal center plane of the vehicle; --- Runtime if possible, should be behind the door frame or fork tilt, and should be at the lower load (run) position. If the above can not fully meet the stability requirements specified for certain types of vehicles, the operating conditions of these vehicles should meet Stability requirements of the combined 4.8. 4.1.4 Electrical requirements Electrical requirements shall comply with GB/T 27544 of. 4.1.5 edge or corner In the normal operating position range operator, as well as in normal operations and routine inspection when there should not be out of range causing dangerous sharp edges Or corners. 4.1.6 energy storage component Stored energy and may cause dangerous components, such as hydraulic accumulator or spring brake means moving or demolition process should take measures Shi before moving or removing it to release energy. 4.2 Start/Run Vehicle should be equipped with a device (such as keys, passwords, card), when not in use to prevent the starting of the apparatus for a vehicle. For by the same manufacturer Step rider vehicles and ride-type vehicle, which both starting device should not be interchanged. For the same operation The one who started the device (such as a magnetic card) can be used for step drive vehicle and ride-type vehicle, but the other does not allow unauthorized start. 4.2.2 unexpected move/start Unless by an operator active steering control device, the vehicle should be avoided from its locked position, such as a slide or creep (due to leakage, etc.). 4.2.2.1 parking brake It shall be equipped with a parking brake to meet the requirements of 4.3.1. For the driving seat vehicle, the parking brake should be able to be in the normal operating position by hand or foot operated operator, or the operator leaves the normal Automatically brake-operating position. Only vehicles equipped with a non-automatic parking brake, should alert the operator to enable the vehicle before leaving the parking Brake. Automatic parking brake control system fails, it should be able to issue a warning to the operator. 4.2.2.2 internal combustion vehicle Internal combustion vehicle shall be equipped with a device, when the transmission is in the engaged state, the device can prevent the engine from starting. 4.2.2.3 Operation Control The operation control unit of the internal combustion vehicle shall be designed so that only the transmission is in the engaged state, the vehicle can be on a level surface from the rest Start moving. 4.2.2.4 Power Run Only when the operator in the normal operating position, ride-type vehicle to perform power running. When the operator returns to normal operating position, but no such reorientation control, speed control, additional activation operation, power It should not be run automatically. 4.2.2.5 clutch pedal manual transmission and manual operation Vehicle with manual gearbox and manual clutch pedal of the vehicle shall comply with the requirements of 4.2.2.2 and 4.2.2.4. 4.2.3 speed 4.2.3.1 Step rider vehicle Speed on level ground with a single step - driving speed of the vehicle should not exceed 4km/h, acceleration should not exceed 0.5m/s2, and And it should only be designed as a low lift height. Speed on a level surface with adjustable speed drive step-type vehicle operator should be adjusted to match the speed of their walk, not It should be more than 6km/h. 4.2.3.2 Step rider vehicles and ride-on vehicles with folding station plate On level ground with the rider and vehicle operations with those standing on the folding station plate Step rider vehicle, its maximum operating Speed should not exceed 16km/h. Vehicle with a folding station plate, see 4.7.3.3. Vehicle with a rider option see 4.7.3.2 and 4.7.3.4. 4.2.3.3 with the lifting mast run Vehicles with lifting mast runtime, no special requirements. 4.3 braking device 4.3.1 Overview All industrial vehicles should be with the service brake and parking brake. Brakes should be consistent with the provisions of GB/T 18849 of. The parking brake should be equipped with a device to prevent accidental release. Parking brake force to be generated by mechanical means. Energizing a service brake failure 4.3.2 When the service brake energy supply failure should not result in the entire brake failure, and should be able to control parking. 4.3.3 Step rider and ride-on vehicle Step rider and ride-on vehicles shall be provided with a braking device, the device should be automatically closed until it is released operator. The device can be used For the service brake and parking brake of the vehicle. 4.4 manual control device 4.4.1 Overview Consistency with the motion of the vehicle 4.4.1.1 The operation control device should be as consistent and ongoing direction of movement of the vehicle. Controls the operation of the vehicle should be limited Or within the outline of the tiller. 4.4.1.2 Operation Multiplayer If you install an additional operating position and there is more than one operator, you can manipulate the same time should be controlled from an operating position System means only exception is the emergency off switch, from all the operating positions can manipulate this switch. A plurality of operating positions 4.4.1.3 When an operator has a plurality of operating positions in an operation position of the operating control device should be excluded from the operation of other operating position The possibility of vertical. The only exception is an emergency power-off switch, from all the operating positions can manipulate this switch. 4.4.2 running and brake control 4.4.2.1 Overview Speed steering control apparatus of action should be designed to increase the speed with the travel control device increases. When the control device is released During playback, it should automatically back to zero. 4.4.2.2 driving seat vehicle With pedal steering and braking control device of the vehicle shall comply with GB/T 26562 of. 4.4.2.3 rider vehicle Operation and brake control device stand-vehicle shall meet the following requirements. a) operational control functions --- When using the tiller, it shall be equipped with control means for controlling the direction and speed of the tiller; --- When using steering wheel controls or the like, the direction and speed control device should be located near the steering wheel. Service brakes in the following circumstances, should automatically braking function. --- If the brake is operated by a tiller, when the tiller is released; --- If the brake is operated by the operation of the control device, when the operation control means is released; --- If the brake is operated by the foot when the pedal is released; --- If the brake is operated by a hand when the handle is operated. b) console lifting height of not more than 1200mm of vehicle When the console lifting height of more than 500mm, shall be provided to prevent the operation of the vehicle, unless the control unit can operate Together with the lifting station. 4.4.2.4 Step rider vehicle Step rider on the vehicle are as follows. a) shall be equipped with control means the direction and speed of the tiller; b) When the tiller is released, it should be able to automatically return to the high rest position, cutting off the direction of traction and brake closed; c) When the tiller is in the low traction operating direction shall be cut off, and the brake shall be closed; d) tiller shall be equipped with a device when it is in the operating position of the head in contact with a solid object (such as the operator's body), can induce vehicle Toward a direction away from the operator to run on the device until the pressure is released or a brake to stop the vehicle. 4.4.2.5 differential lock The process of operation of the vehicle should be able... ......Source: Above contents are excerpted from the full-copy PDF -- translated/reviewed by: www.ChineseStandard.net / Wayne Zheng et al. Tips & Frequently Asked Questions:Question 1: How long will the true-PDF of English version of GB 10827.1-2014 be delivered?Answer: The full copy PDF of English version of GB 10827.1-2014 can be downloaded in 9 seconds, and it will also be emailed to you in 9 seconds (double mechanisms to ensure the delivery reliably), with PDF-invoice.Question 2: Can I share the purchased PDF of GB 10827.1-2014_English with my colleagues?Answer: Yes. The purchased PDF of GB 10827.1-2014_English will be deemed to be sold to your employer/organization who actually paid for it, including your colleagues and your employer's intranet.Question 3: Does the price include tax/VAT?Answer: Yes. Our tax invoice, downloaded/delivered in 9 seconds, includes all tax/VAT and complies with 100+ countries' tax regulations (tax exempted in 100+ countries) -- See Avoidance of Double Taxation Agreements (DTAs): List of DTAs signed between Singapore and 100+ countriesQuestion 4: Do you accept my currency other than USD?Answer: Yes. www.ChineseStandard.us -- GB 10827.1-2014 -- Click this link and select your country/currency to pay, the exact amount in your currency will be printed on the invoice. Full PDF will also be downloaded/emailed in 9 seconds.Question 5: Should I purchase the latest version GB 10827.1-2014?Answer: Yes. Unless special scenarios such as technical constraints or academic study, you should always prioritize to purchase the latest version GB 10827.1-2014 even if the enforcement date is in future. Complying with the latest version means that, by default, it also complies with all the earlier versions, technically.How to buy and download a true PDF of English version of GB 10827.1-2014?A step-by-step guide to download PDF of GB 10827.1-2014_EnglishStep 1: Visit website https://www.ChineseStandard.net (Pay in USD), or https://www.ChineseStandard.us (Pay in any currencies such as Euro, KRW, JPY, AUD).Step 2: Search keyword "GB 10827.1-2014". Step 3: Click "Add to Cart". If multiple PDFs are required, repeat steps 2 and 3 to add up to 12 PDFs to cart. Step 4: Select payment option (Via payment agents Stripe or PayPal). Step 5: Customize Tax Invoice -- Fill up your email etc. Step 6: Click "Checkout". Step 7: Make payment by credit card, PayPal, Google Pay etc. After the payment is completed and in 9 seconds, you will receive 2 emails attached with the purchased PDFs and PDF-invoice, respectively. Step 8: Optional -- Go to download PDF. Step 9: Optional -- Click Open/Download PDF to download PDFs and invoice. See screenshots for above steps: Steps 1~3 Steps 4~6 Step 7 Step 8 Step 9 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}